
稻虾蟹共生系统项目说明
稻虾蟹共生系统项目说明
一、认识物联网模块
主控模块:
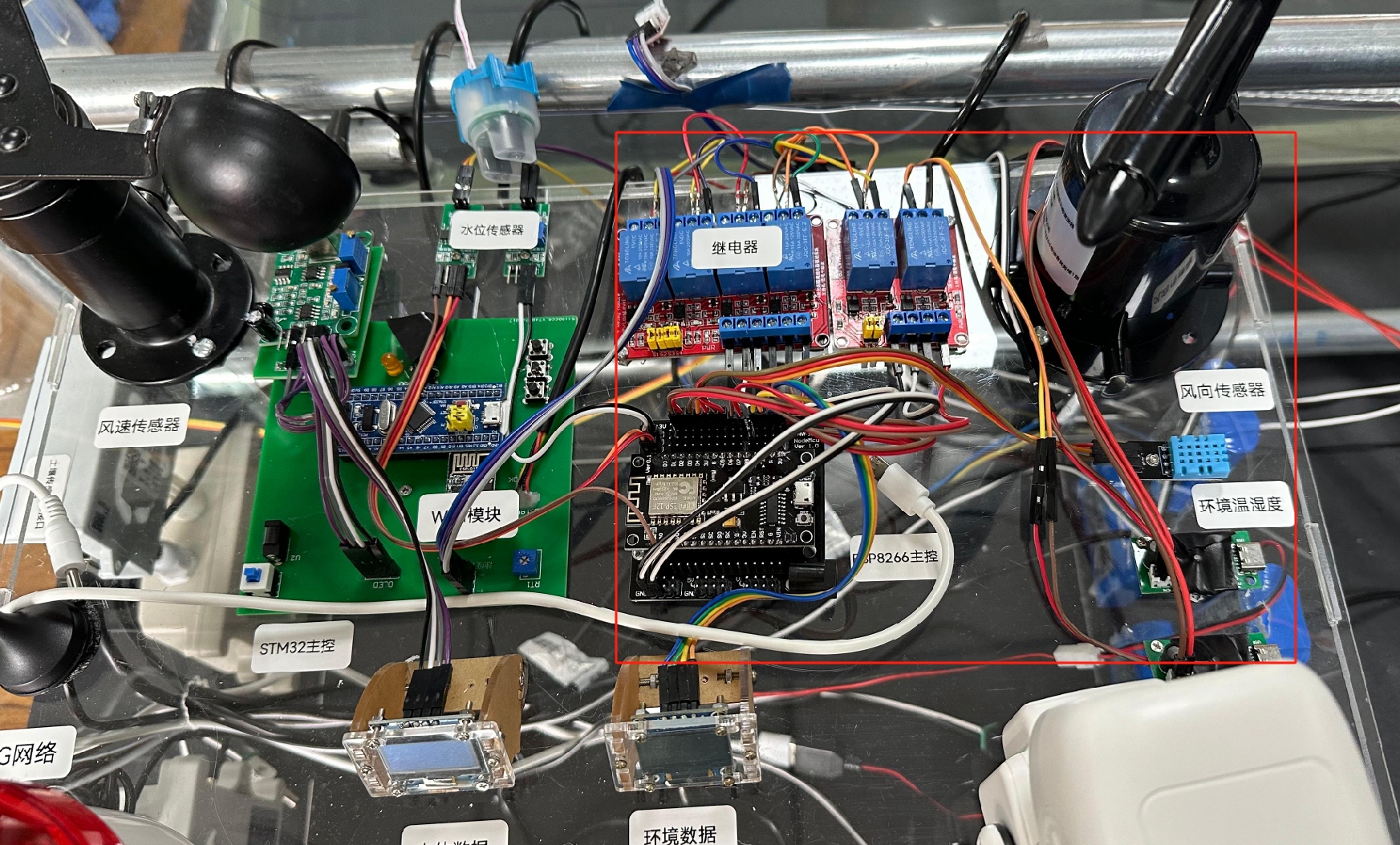
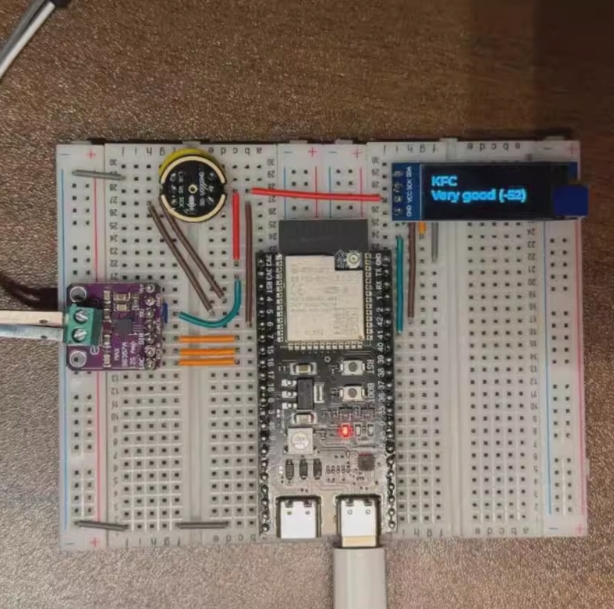
主控板为ESP8266,链接环境温湿度传感器、雾化片驱动、水位传感器、继电器、OLED屏幕
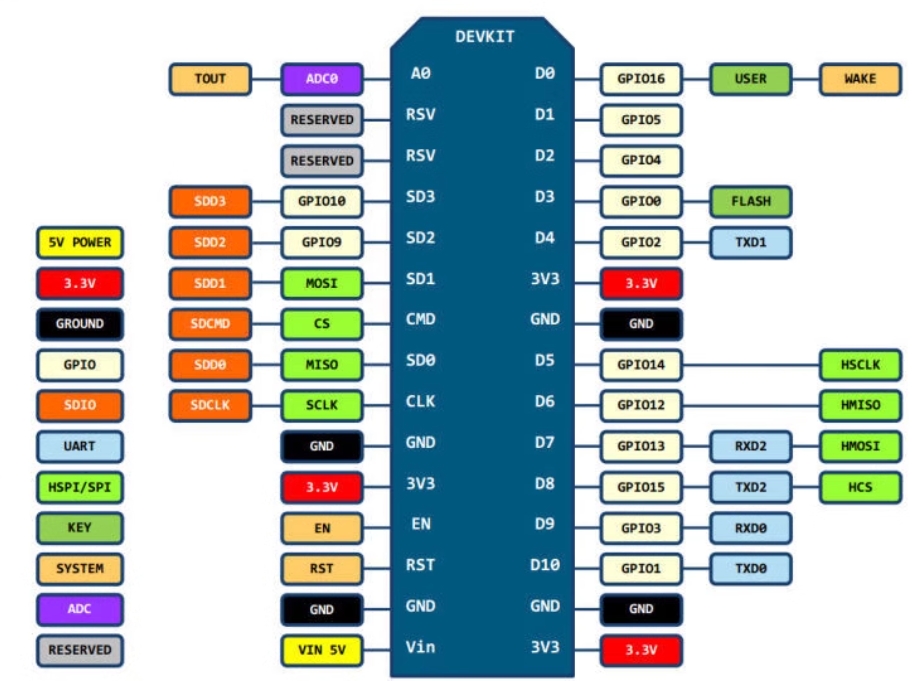
1、ESP8266主控板

Arduino IDE软件esp32+esp8266离线安装包链接:https://pan.baidu.com/s/1LymkbGFzdjkwvs4E7MMi2g?pwd=8889
CH340资料链接: https://pan.baidu.com/s/10xkZRh0lhhMzrGsPKYjVlw?pwd=l9hj 提取码:l9hj
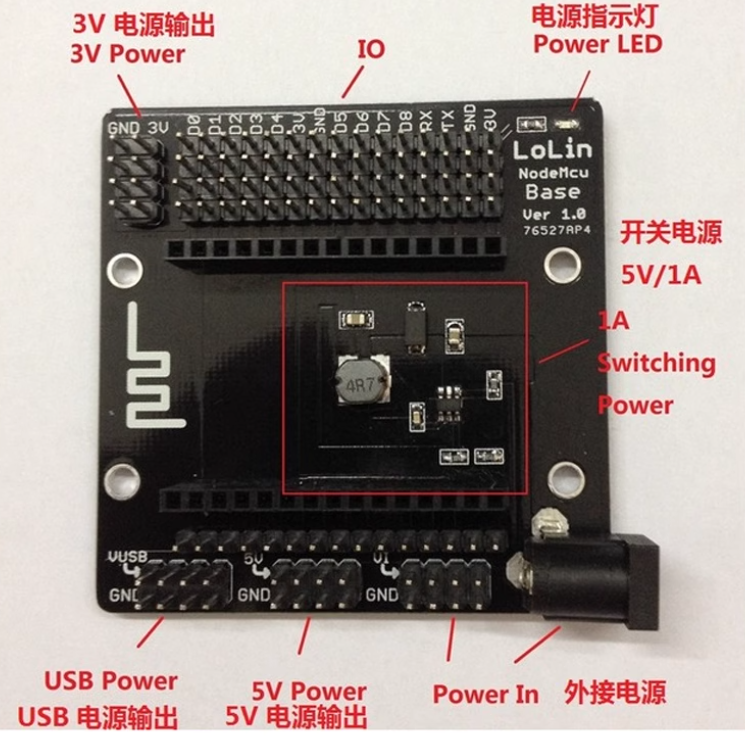
2、ESP8266扩展板
3、环境温湿度传感器

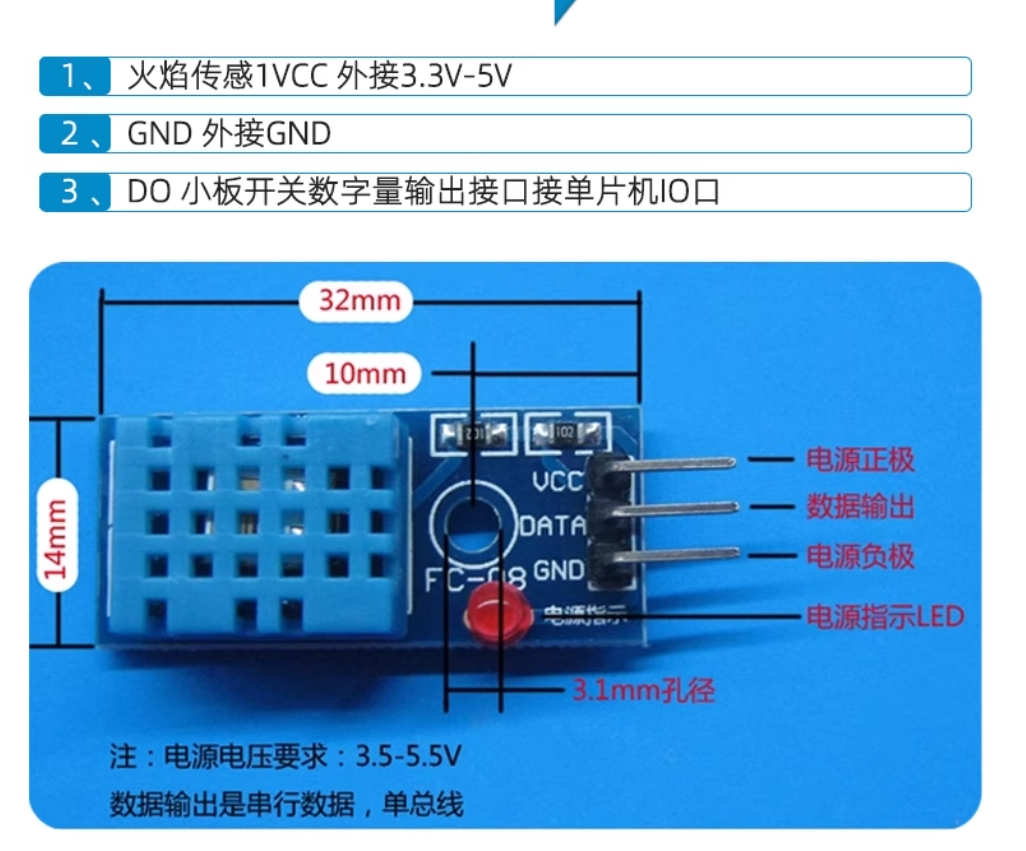
DHT11资料下载链接:https://pan.baidu.com/s/1WdJK13-oJNpTJXn-8sp0DQ?pwd=8889提取码:8889
4、水位传感器
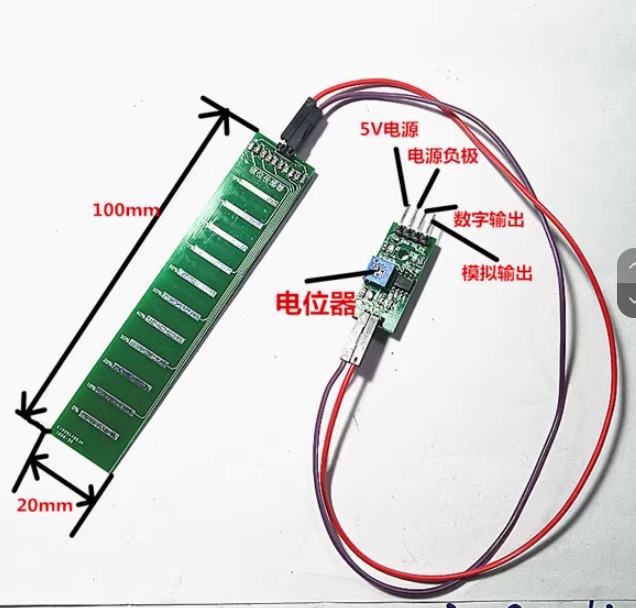
使用讲解视频,电路图,相关资料链接:
链接:https://pan.baidu.com/s/15i3dfnr396_Riqrt5KNIFg?pwd=cupr
模块测试视频:https://www.ixigua.com/6947472265965470239?utm_source=xiguastudio
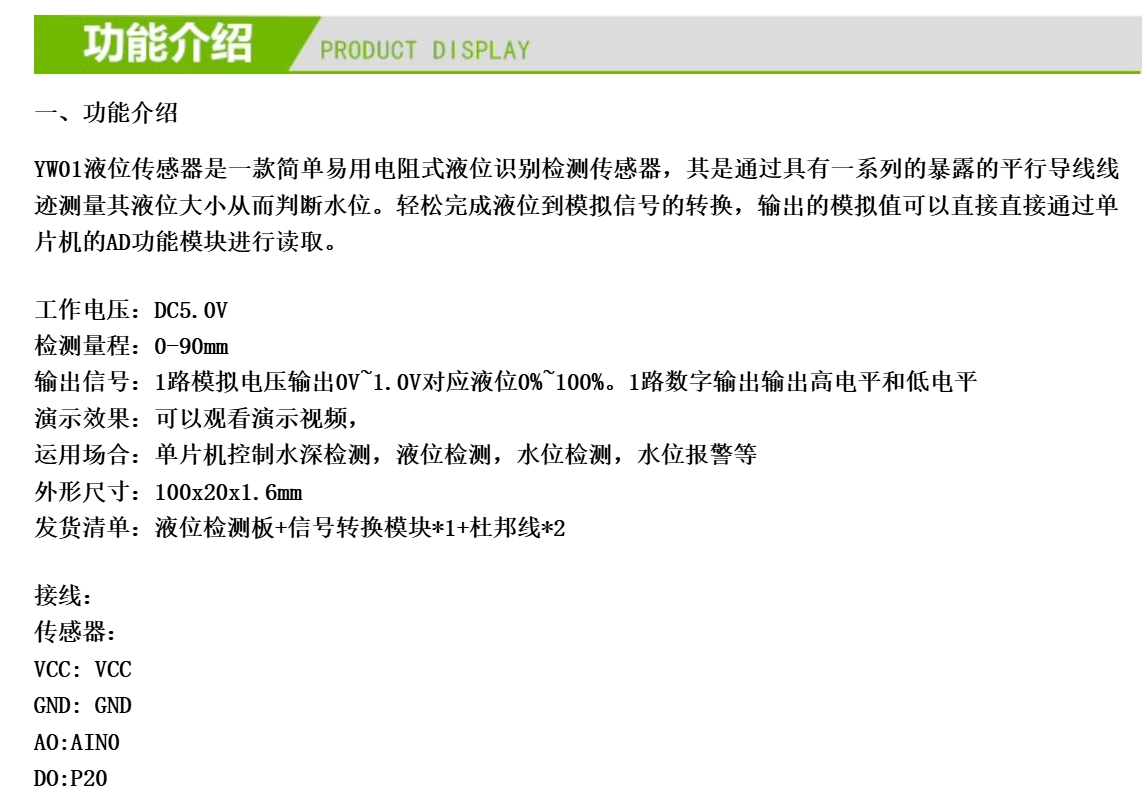
5、OLED显示屏
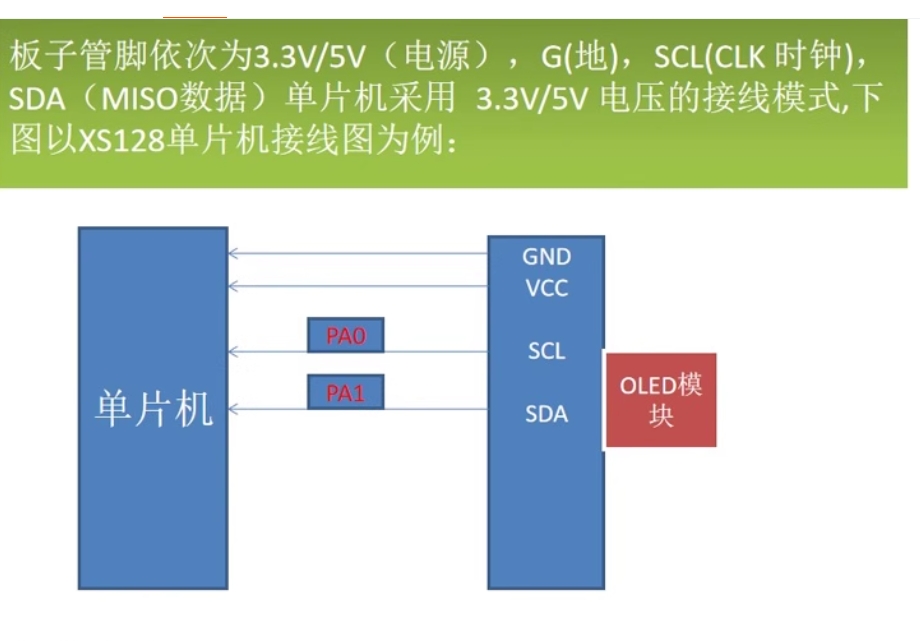
新款0.96寸 4管脚 白色 焊好排针 使用说明:https://www.bilibili.com/opus/1019499397834080257
经典款0.96寸 4管脚 白色 焊好排针 使用说明:https://www.bilibili.com/opus/1019500909654179841
新款0.96寸4管脚资料链接:https://pan.baidu.com/s/1l9Az0SOl7TOfX1HwjdqMjg?pwd=8889 提取码: 8889
0.96寸4管脚资料链接:https://pan.baidu.com/s/1Zp6dyui6dDvy03ossLSKnw?pwd=8889 提取码: 8889
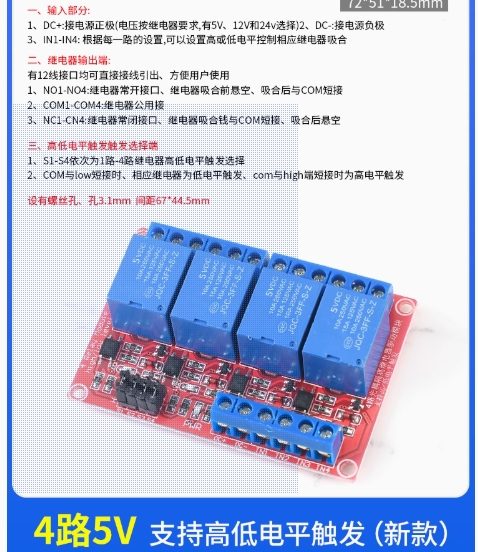
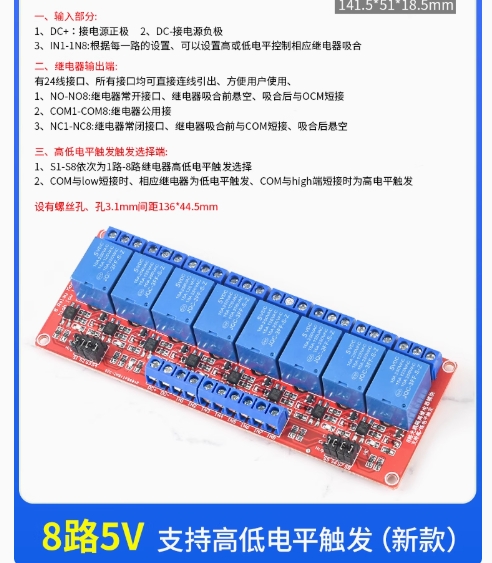
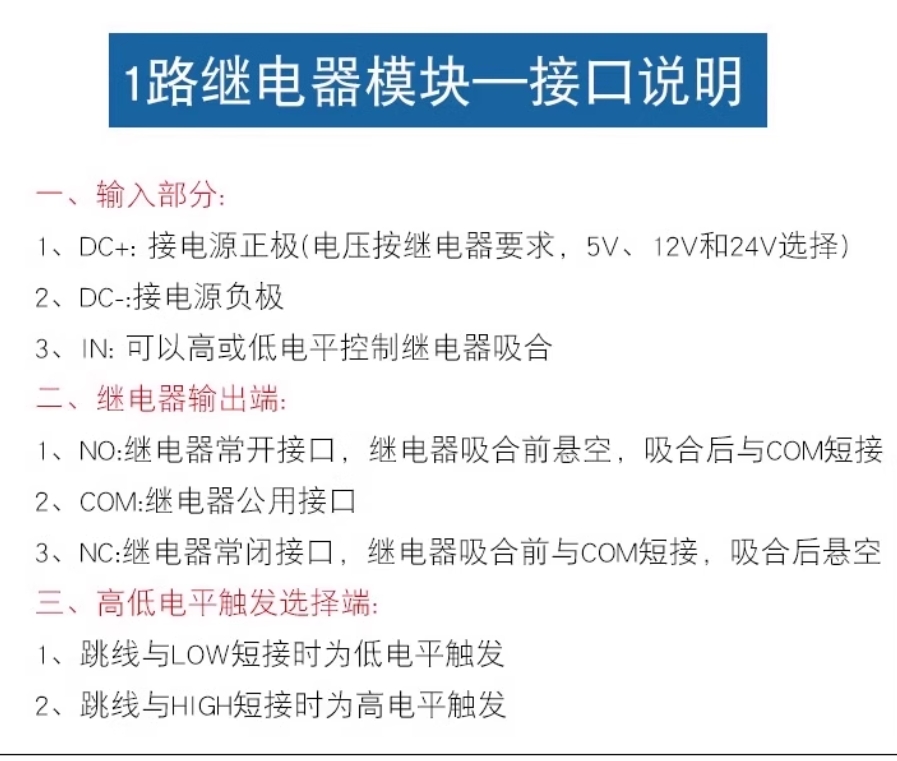
6、继电器

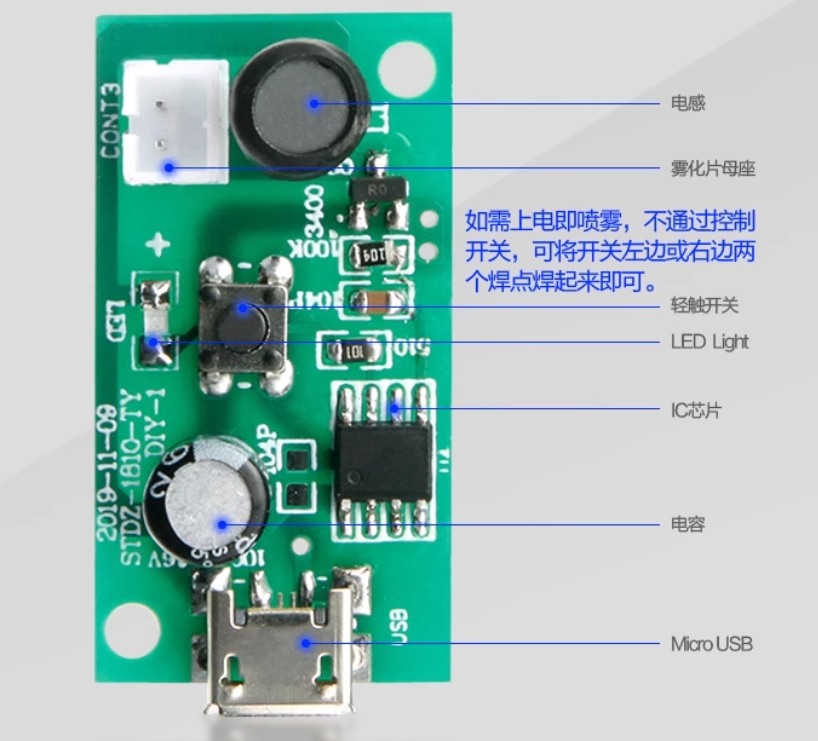
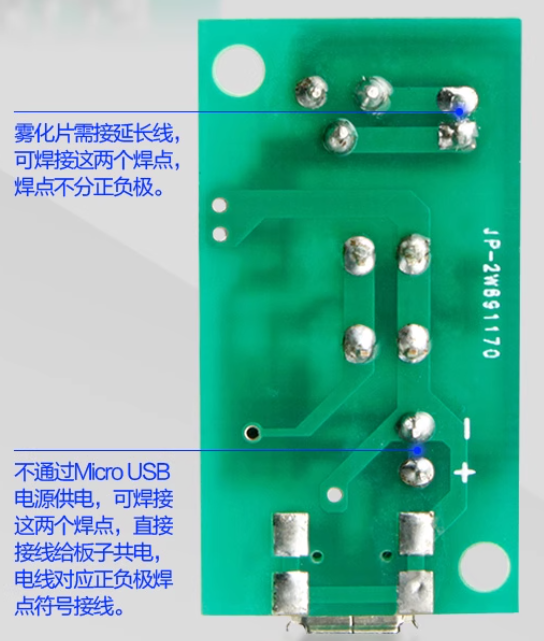
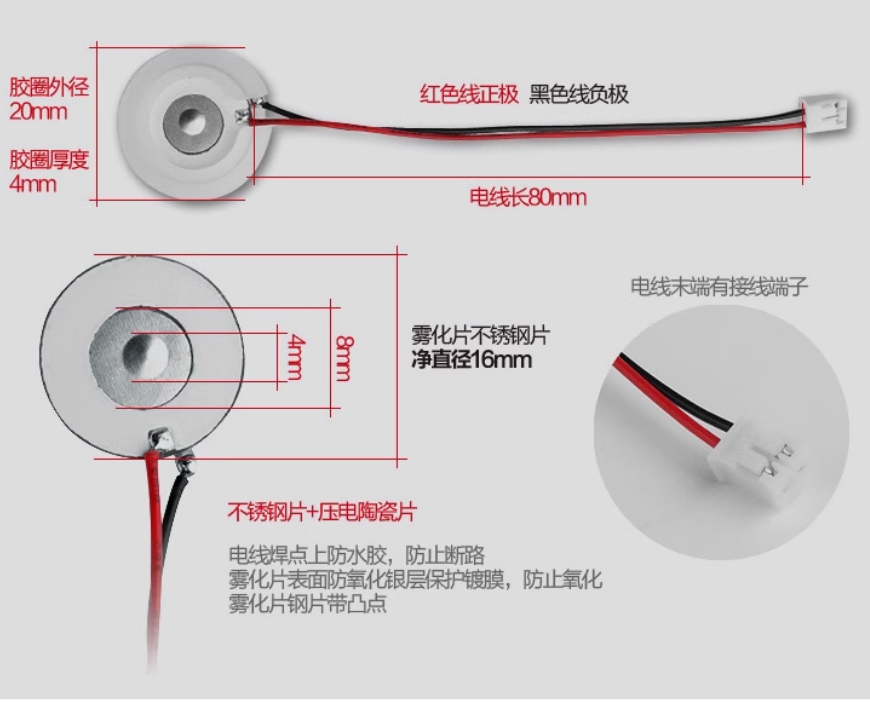
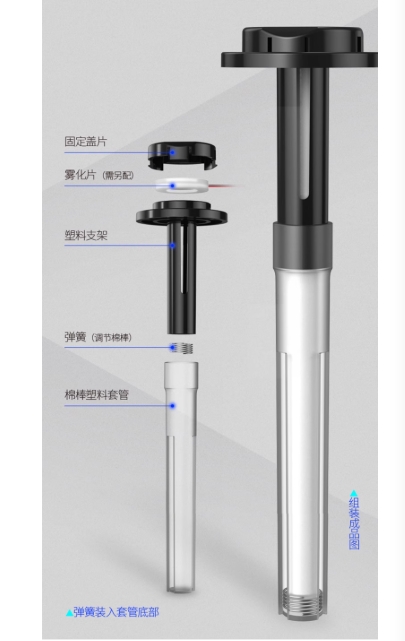
7、雾化驱动
8、水泵

9、增氧泵

10、报警器

水质检测模块:
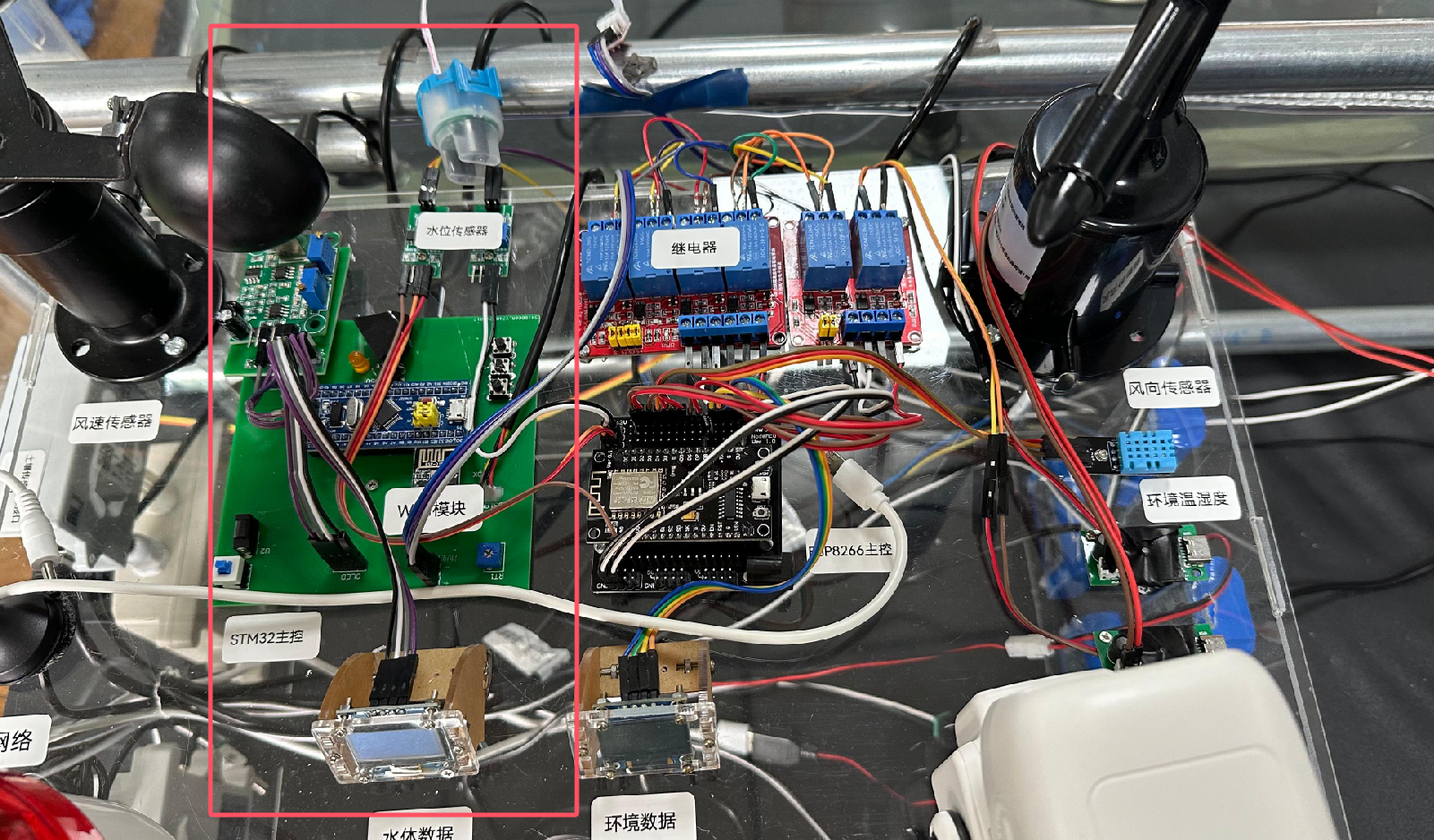
以STM32系列单片机为核心设计水质检测系统,自行设计电源,选用PH传感器采集当前水体酸碱度, DS18B20温度采集、浊度传感器、OLED液晶显示,按键设置和蜂鸣器报警提醒构成。主要完成以下工作:
- 基于STM32单片机水质检测设计方案。
- 温度传感器、PH、浊度传感器等与单片机的接口电路设计。
- OLED液晶显示当前信息。
- 按键设置参数报警范围,通过蜂鸣器进行声光报警。
- 电源通过USB-5V供电为整个系统供电
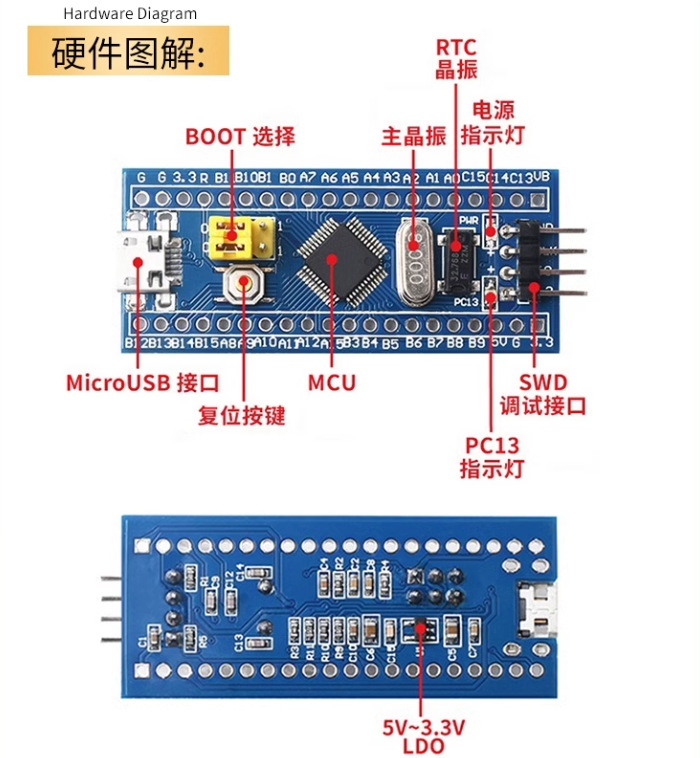
1、STM32F103C8T6开发板

STM32最小系统资料包: https://pan.baidu.com/s/1voa4MsLO3xzu8Y-DC1J3OQ 提取码:3did
STM32F103C8T6数据手册:https://pan.baidu.com/s/13T5tt842yjWaCk66cwV8Pg?pwd=pirq 提取码:pirq
2、DS18B20温度传感器


3、PH监测模块+PH电极探头

使用资料:
链接:https://pan.baidu.com/s/1NQ1DHlxOauFRJ2vkfJrxow
提取码:1234
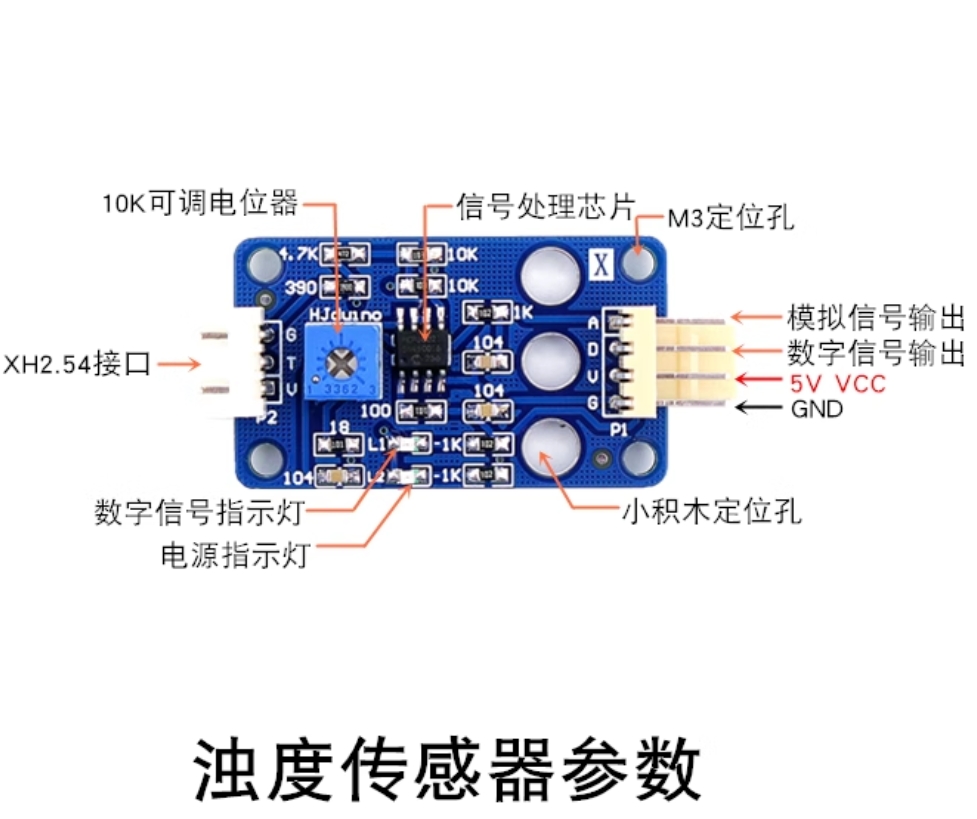
4、浊度传感器


浊度资料链接: https://pan.baidu.com/s/1npfhQQ3SwOPjhHAwqtPSNw?pwd=egc8
5、OLED显示屏
6、WIFI模块

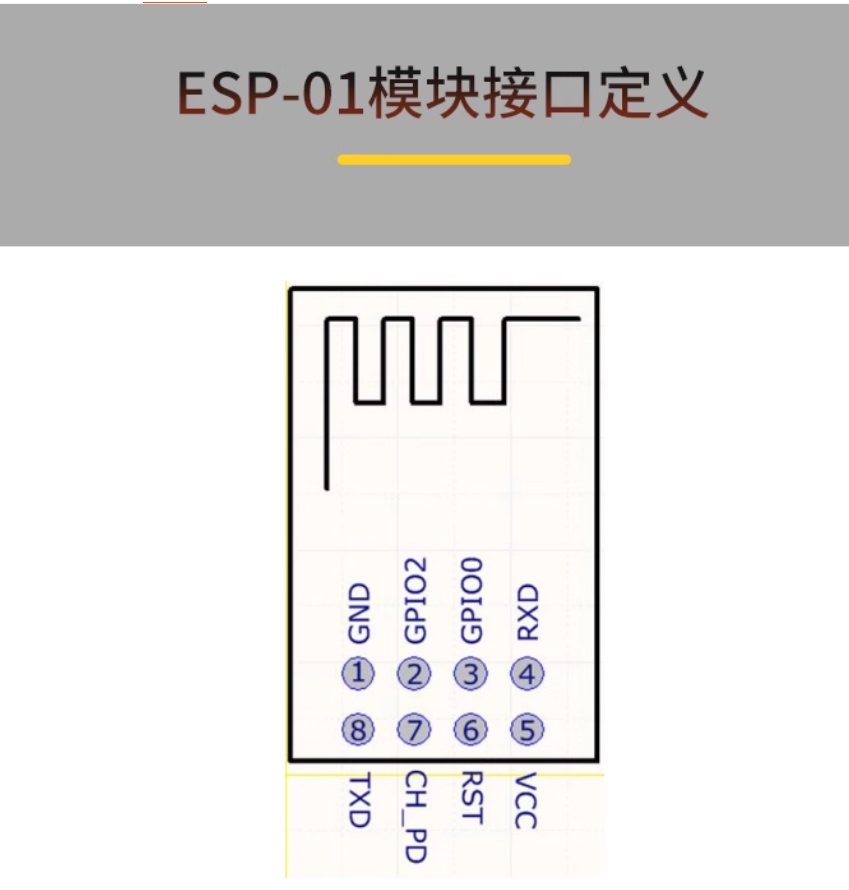
ESP-01S 使用说明:https://www.bilibili.com/opus/1069977233630691330
7、蜂鸣器


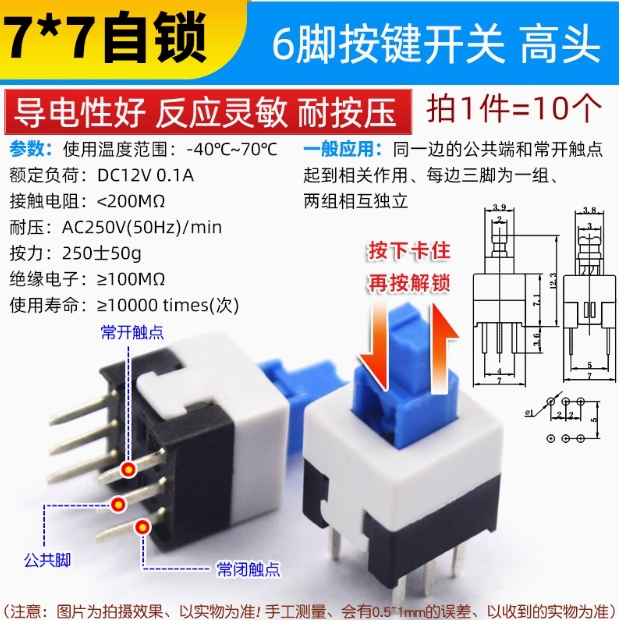
8、自锁开关

环境监测
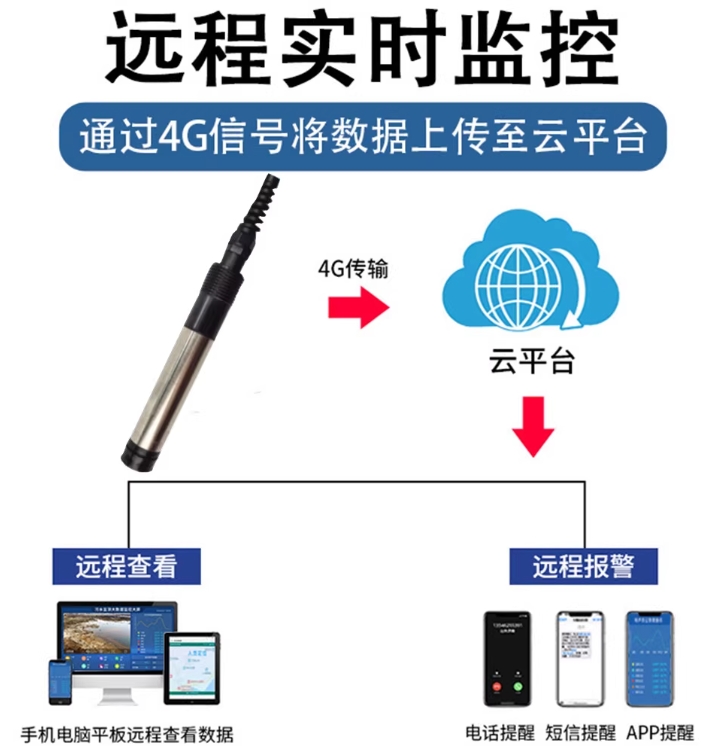
1、溶解氧传感器

地址:https://yunya.site/
账号:158****6824
密码:123456
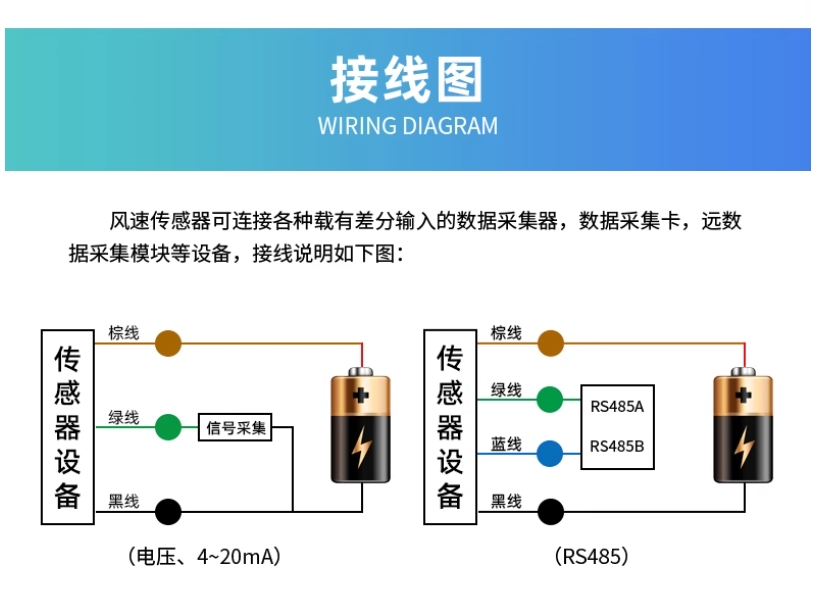
2、风速传感器


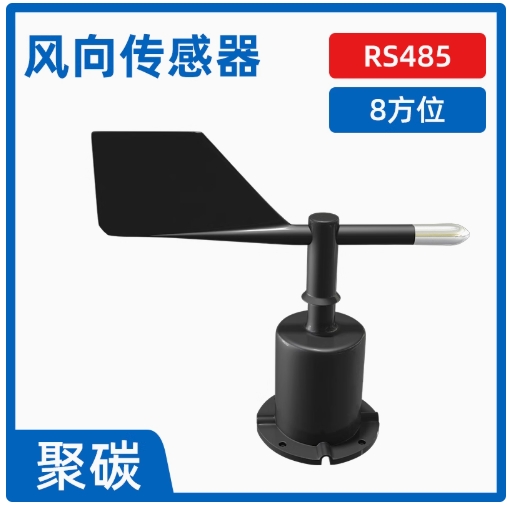
3、风向传感器
4、光照传感器


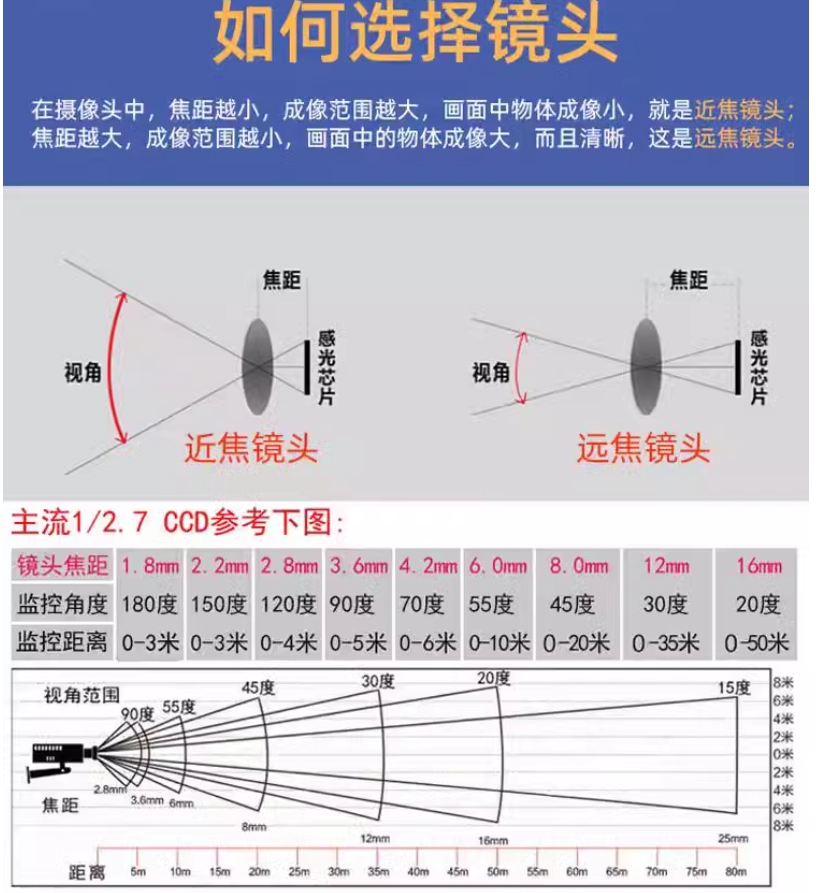
5、有线摄像头

6、ESP32-CAM摄像头

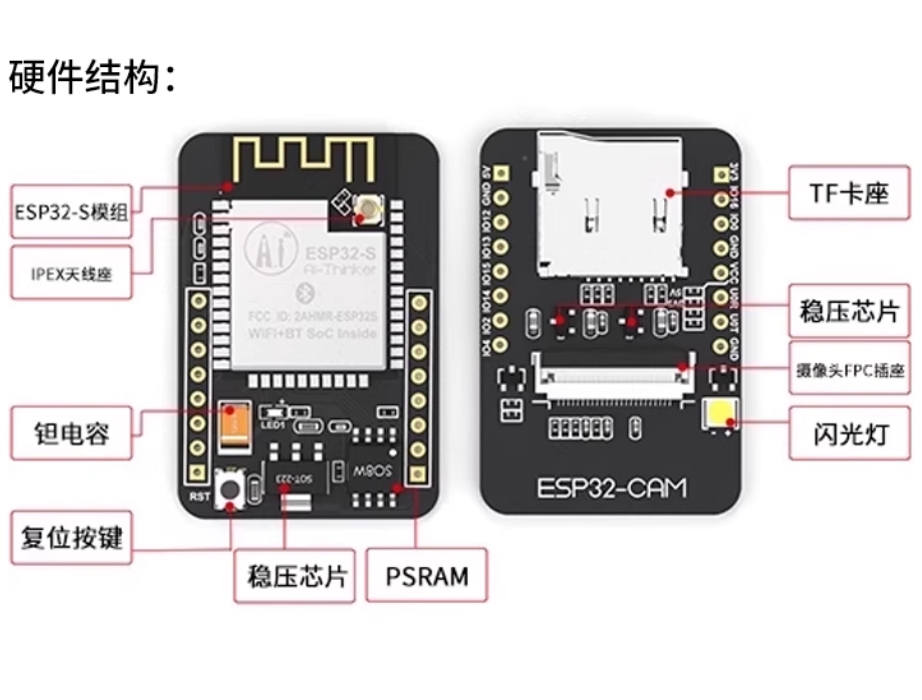
ESP32-CAM(带摄像头) 使用教程视频:https://www.bilibili.com/opus/1011714834051366936
ESP32+ESP32-CAM资料: https://pan.baidu.com/s/1sS52Y4oghFh8jwgl9YQ3eg?pwd=8889 提取码:8889
供电系统


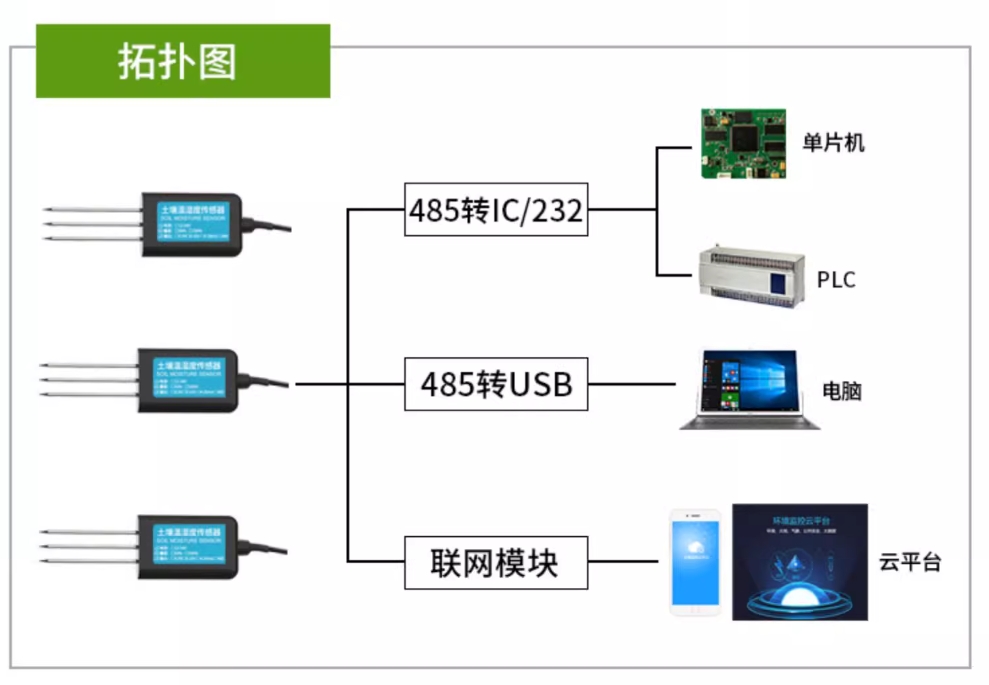
土壤监测

AI小农


驱鸟车


无人机

巡航船

二、物联网程序开发
ESP8266开发
1、CH340串口驱动
CH340资料链接: https://pan.baidu.com/s/10xkZRh0lhhMzrGsPKYjVlw?pwd=l9hj 提取码:l9hj
文件描述
USB转串口Windows一键式安装驱动程序,支持CH340和CH341,支持32/64位Windows 11/10/8.1/8/7/VISTA/XP,SERVER 2022/2019/2016/2012/2008/2003,2000/ME/98,通过微软数字签名认证,支持USB转UART的3线和9线SERIAL串口等,用于随产品发行到最终用户。
适用范围
CH340G,CH340T,CH340C,CH340N, CH340K, CH340E,CH340B,CH341A,CH341F, CH341T,CH341B,CH341C,CH341U
2、开发软件arduino
安装Arduino IDE 、ESP32离线包、ESP8266离线包
Arduino IDE软件esp32+esp8266离线安装包链接:https://pan.baidu.com/s/1LymkbGFzdjkwvs4E7MMi2g?pwd=8889
添加附加开发板地址打开Arduino IDE菜单 > 文件 >首选项,在 附加开发板管理器网址 输入框中,填入以下网址:
https://arduino.me/packages/esp32.json
https://arduino.me/packages/esp8266.json
3、程序开发
#define BLYNK_PRINT Serial
#include <U8g2lib.h>
#include <Wire.h>
#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
#include <DHT.h>
#include <ESP8266WebServer.h>
ESP8266WebServer localServer(80);
U8G2_SSD1306_128X64_NONAME_1_SW_I2C u8g2(U8G2_R0, 3, 1, U8X8_PIN_NONE);
// 配置信息
char auth[] = "08cc7b9ef4f84ec9a17b87ee06594ffa";
char ssid[] = "test_wifi";
char pass[] = "123456888";
BlynkTimer timer;
DHT dht02(2, 11);
int vpin_value;
// 传感器状态
struct SensorStatus {
bool dhtConnected = true;
bool soilSensorConnected = true;
unsigned long lastDHTRead = 0;
};
SensorStatus sensorStatus;
void sendSensorData() {
float temp = NAN;
float humi = NAN;
int soil = -1;
// 读取DHT传感器(限制读取频率)
if (millis() - sensorStatus.lastDHTRead > 2000) {
temp = dht02.readTemperature();
humi = dht02.readHumidity();
sensorStatus.lastDHTRead = millis();
if (isnan(temp) || isnan(humi)) {
sensorStatus.dhtConnected = false;
} else {
sensorStatus.dhtConnected = true;
}
}
soil = analogRead(A0);
sensorStatus.soilSensorConnected = (soil != 0 && soil != 1023); // 0或1023通常表示传感器问题
// 发送到Blynk
Blynk.virtualWrite(V0, sensorStatus.dhtConnected ? temp : -1);
Blynk.virtualWrite(V1, sensorStatus.dhtConnected ? humi : -1);
Blynk.virtualWrite(V2, sensorStatus.soilSensorConnected ? soil : -1);
}
void displaySensorData() {
u8g2.firstPage();
do {
u8g2.setFont(u8g2_font_unifont_t_chinese3);
u8g2.setFontPosTop();
// 温度
u8g2.setCursor(0, 0);
if (!sensorStatus.dhtConnected) {
u8g2.print("wendu: ERROR");
} else {
u8g2.print(String("wendu: ") + String(dht02.readTemperature()));
u8g2.drawCircle(95, 2, 2, U8G2_DRAW_ALL);
u8g2.setCursor(100, 0);
u8g2.print("C");
}
// 湿度
u8g2.setCursor(0, 20);
if (!sensorStatus.dhtConnected) {
u8g2.print("shidu: ERROR");
} else {
u8g2.print(String("shidu: ") + String(dht02.readHumidity()) + "%");
}
// 水位
u8g2.setCursor(0, 40);
if (!sensorStatus.soilSensorConnected) {
u8g2.print("shuiwei: ERROR");
} else {
u8g2.print(String("shuiwei: ") + String(analogRead(A0)));
}
} while (u8g2.nextPage());
}
BLYNK_WRITE(V3) {
digitalWrite(5, param.asInt() ? HIGH : LOW); // D1 → GPIO5
}
BLYNK_WRITE(V4) {
digitalWrite(4, param.asInt() ? HIGH : LOW); // D2 → GPIO4
}
BLYNK_WRITE(V5) {
digitalWrite(0, param.asInt() ? HIGH : LOW); // D3 → GPIO0
}
BLYNK_WRITE(V6) {
digitalWrite(14, param.asInt() ? HIGH : LOW); // D5 → GPIO14
}
BLYNK_WRITE(V7) {
digitalWrite(12, param.asInt() ? HIGH : LOW); // D6 → GPIO12
}
BLYNK_WRITE(V8) {
digitalWrite(13, param.asInt() ? HIGH : LOW); // D7 → GPIO13
}
void handleSensors() {
float temp = dht02.readTemperature();
float humi = dht02.readHumidity();
int waterLevel = analogRead(A0);
String json = "{";
json += "\"status\":{";
json += "\"dht\":" + String(sensorStatus.dhtConnected ? 1 : 0) + ",";
json += "\"soil\":" + String(sensorStatus.soilSensorConnected ? 1 : 0);
json += "},";
json += "\"data\":{";
json += "\"temperature\":" + (sensorStatus.dhtConnected ? String(temp) : "null") + ",";
json += "\"humidity\":" + (sensorStatus.dhtConnected ? String(humi) : "null") + ",";
json += "\"water_level\":" + (sensorStatus.soilSensorConnected ? String(waterLevel) : "null");
json += "}}";
localServer.send(200, "application/json", json);
}
void handleControl() {
if (!localServer.hasArg("pin") || !localServer.hasArg("state")) {
localServer.send(400, "application/json",
"{\"code\":400,\"error\":\"Missing 'pin' or 'state'\"}");
return;
}
String pinStr = localServer.arg("pin");
String stateStr = localServer.arg("state");
if (pinStr != "V3" && pinStr != "V4" && pinStr != "V5" &&
pinStr != "V6" && pinStr != "V7" && pinStr != "V8") {
localServer.send(400, "application/json",
"{\"code\":400,\"error\":\"Invalid 'pin'\"}");
return;
}
int pin;
if (pinStr == "V3") pin = 5;
else if (pinStr == "V4") pin = 4;
else if (pinStr == "V5") pin = 0;
else if (pinStr == "V6") pin = 14;
else if (pinStr == "V7") pin = 12;
else if (pinStr == "V8") pin = 13;
bool state = (stateStr == "1");
digitalWrite(pin, state ? HIGH : LOW);
String response = "{\"code\":200,\"pin\":\"" + pinStr + "\",\"state\":" + stateStr + "}";
localServer.send(200, "application/json", response);
}
void setup() {
u8g2.setI2CAddress(0x3C * 2);
u8g2.begin();
Serial.begin(9600);
Blynk.begin(auth, ssid, pass, IPAddress(182, 61, 28, 31), 8080);
dht02.begin();
u8g2.enableUTF8Print();
pinMode(5, OUTPUT); // D1
pinMode(4, OUTPUT); // D2
pinMode(0, OUTPUT); // D3
pinMode(14, OUTPUT); // D5
pinMode(12, OUTPUT); // D6
pinMode(13, OUTPUT); // D7
timer.setInterval(2000L, sendSensorData);
timer.setInterval(1000L, displaySensorData);
localServer.on("/sensors", handleSensors);
localServer.on("/control", HTTP_GET, handleControl);
localServer.begin();
}
void loop() {
Blynk.run();
timer.run();
localServer.handleClient();
}
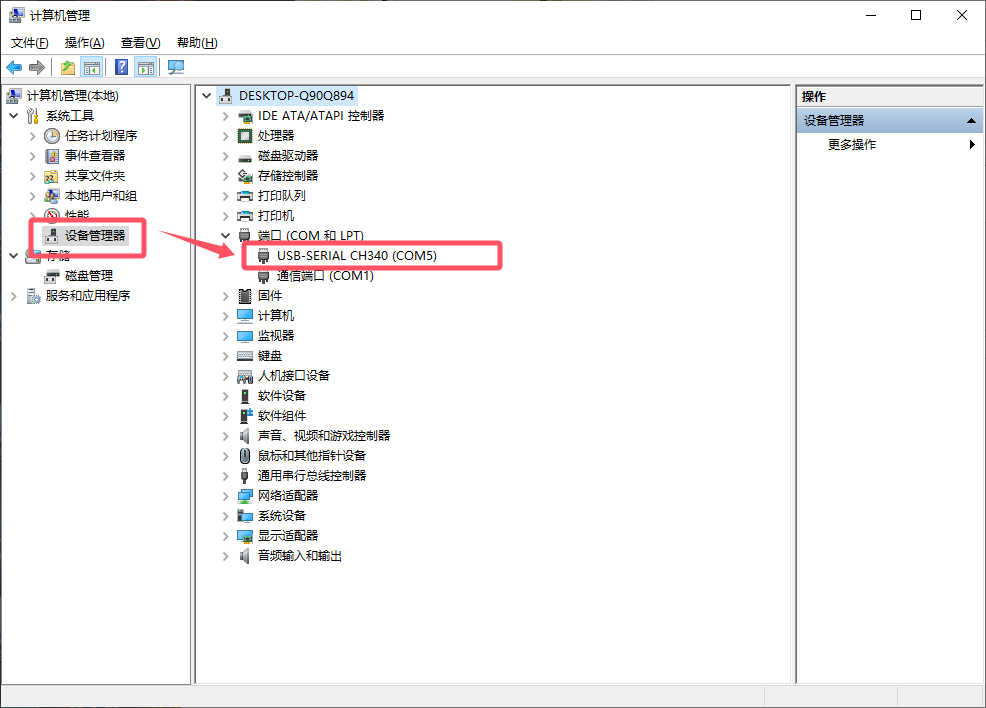
4、烧录步骤
将ESP8266通过USB链接电脑

查询串行端口
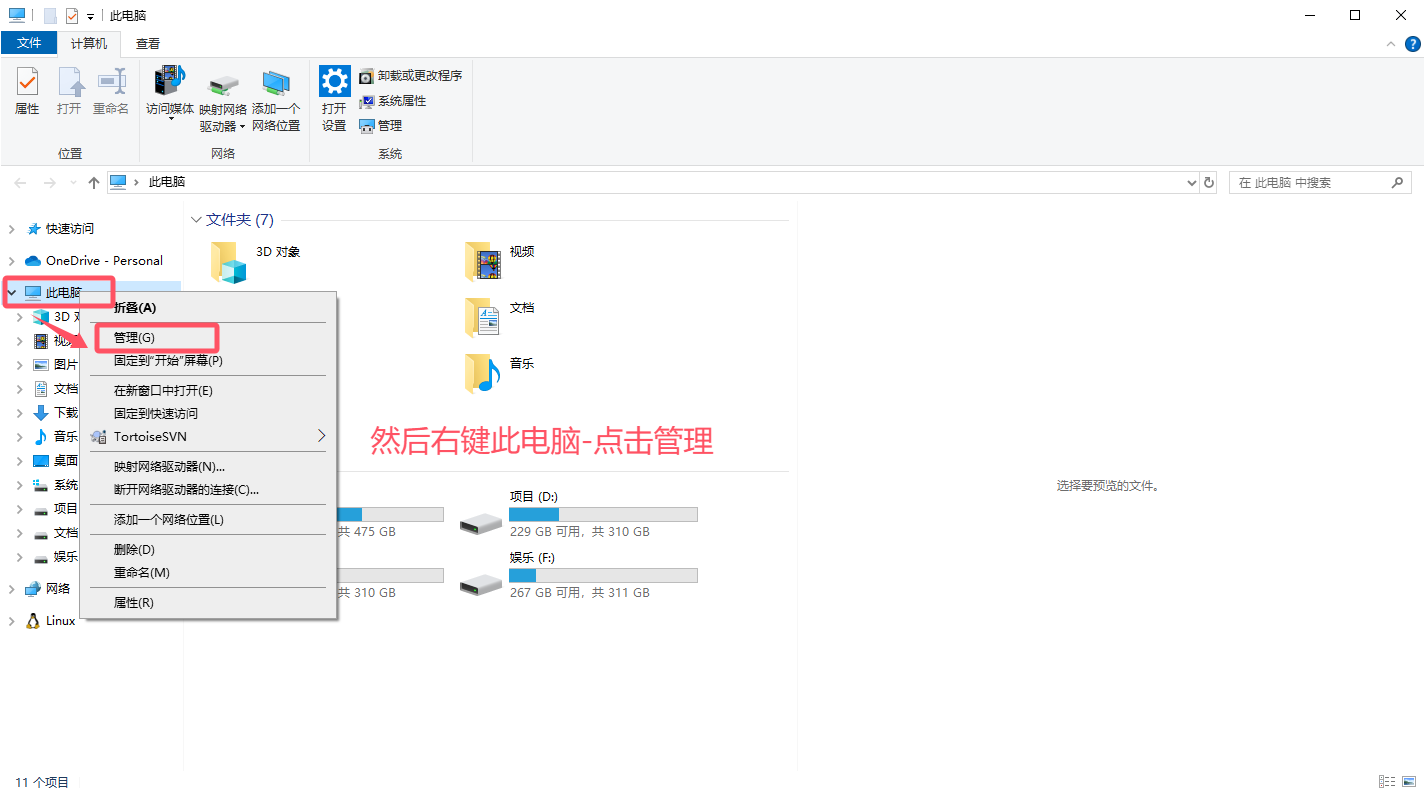
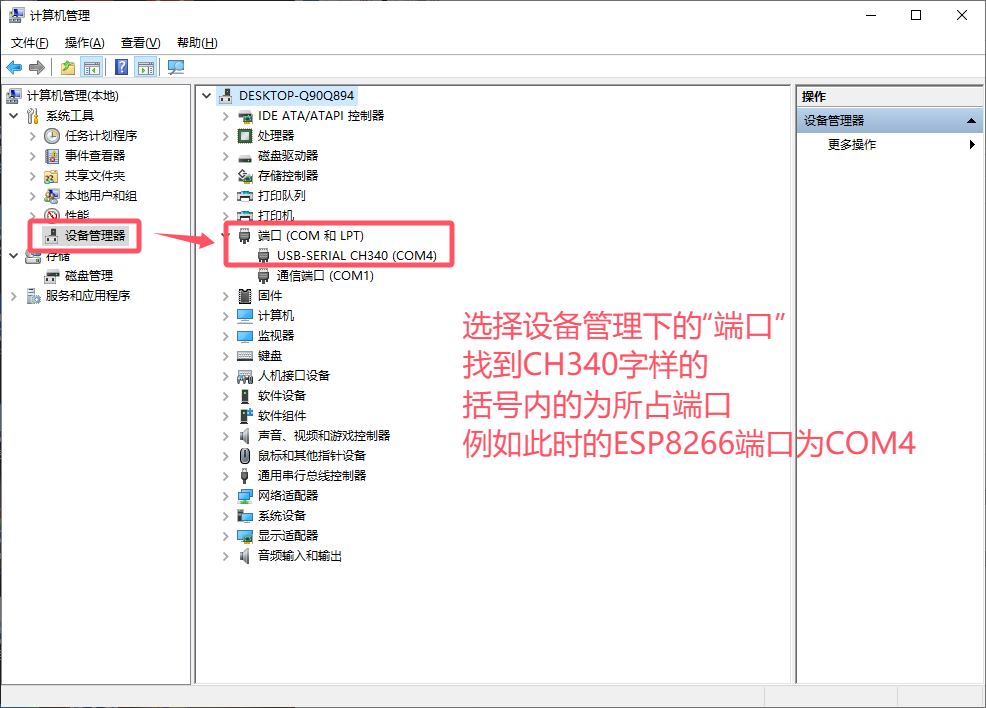
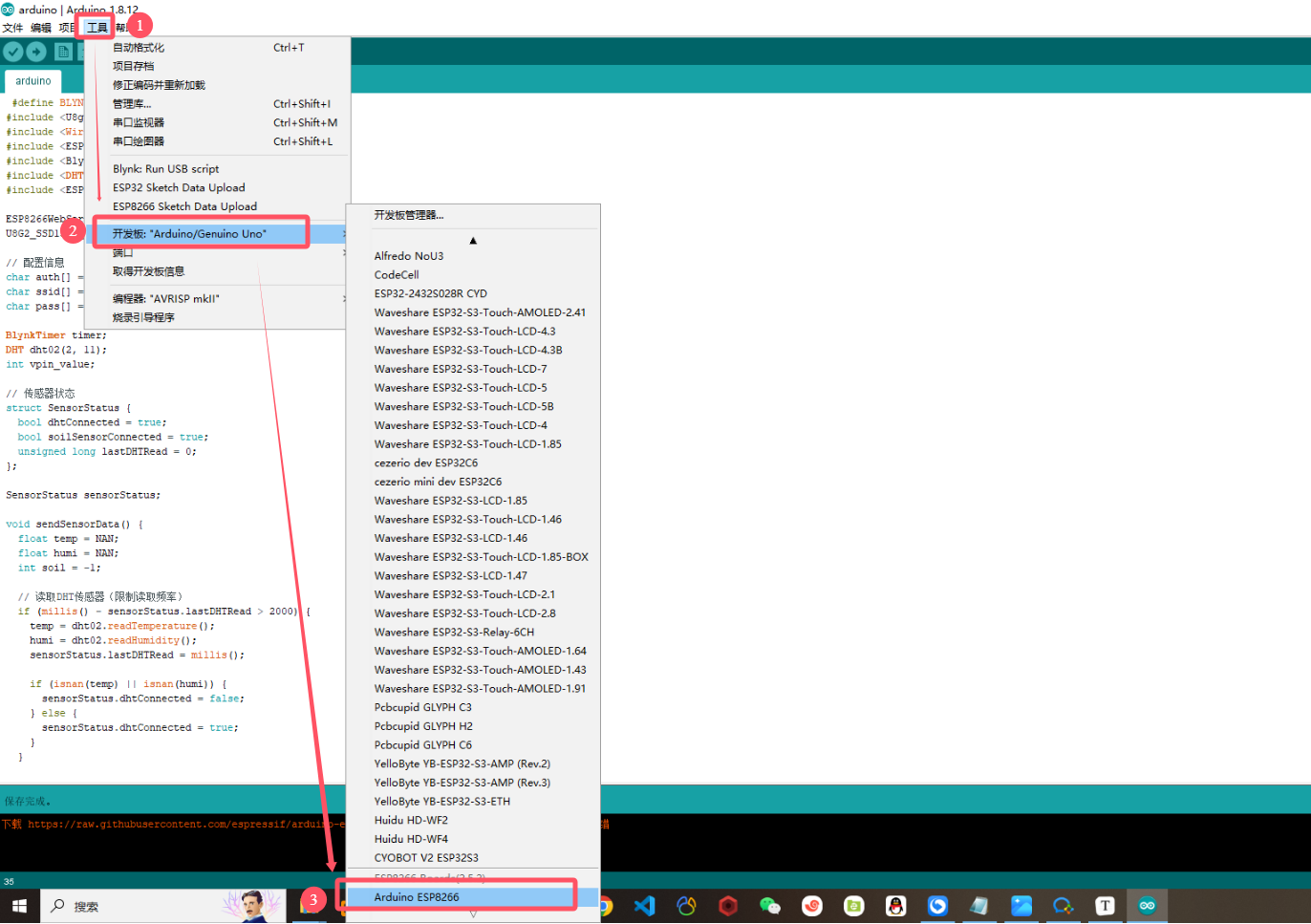
选择库:打开开发工具-->导入程序-->工具栏(工具)-->开发板-->ESP8266
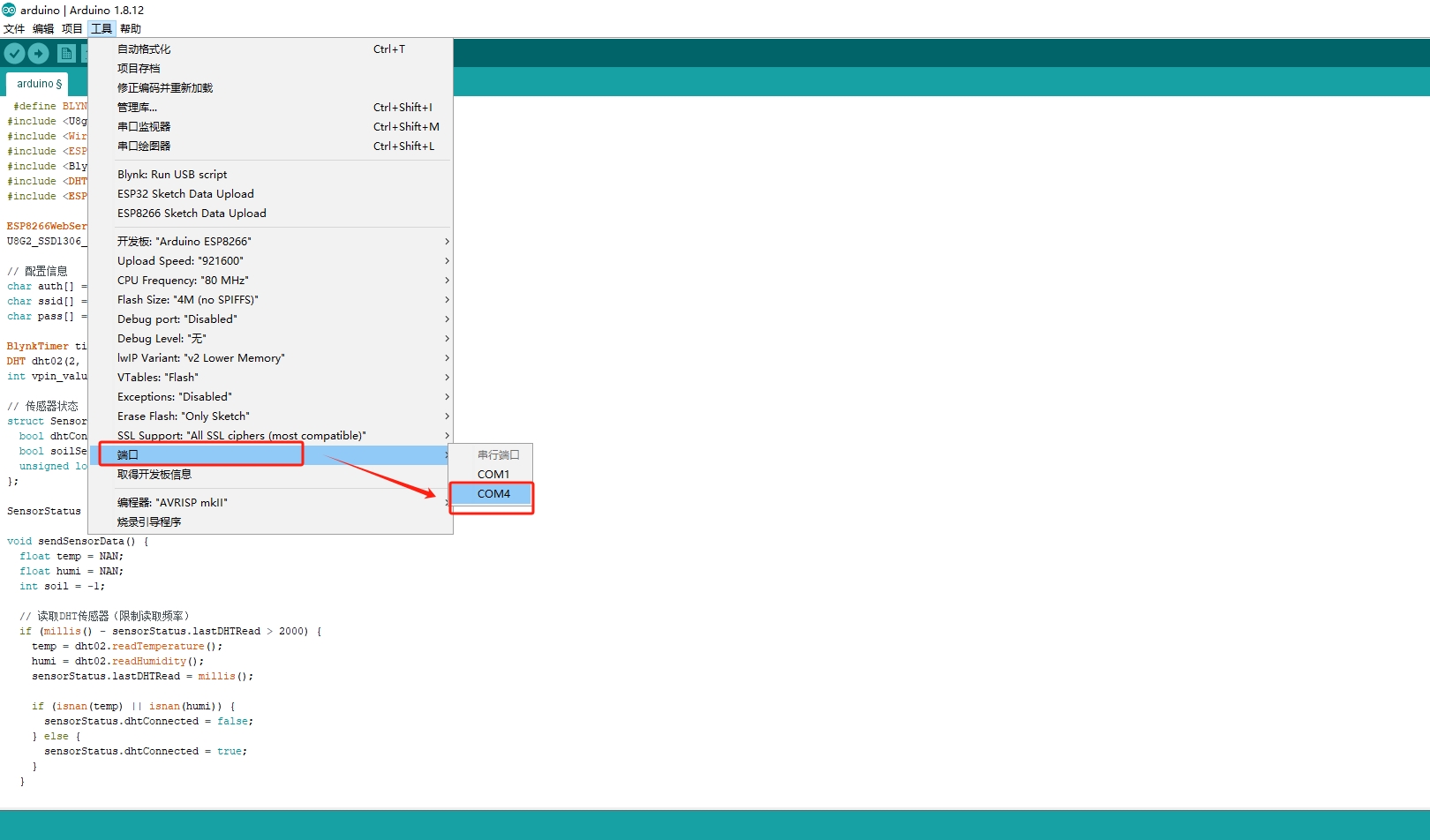
开发工具中选择端口:工具-->端口-->串行端口
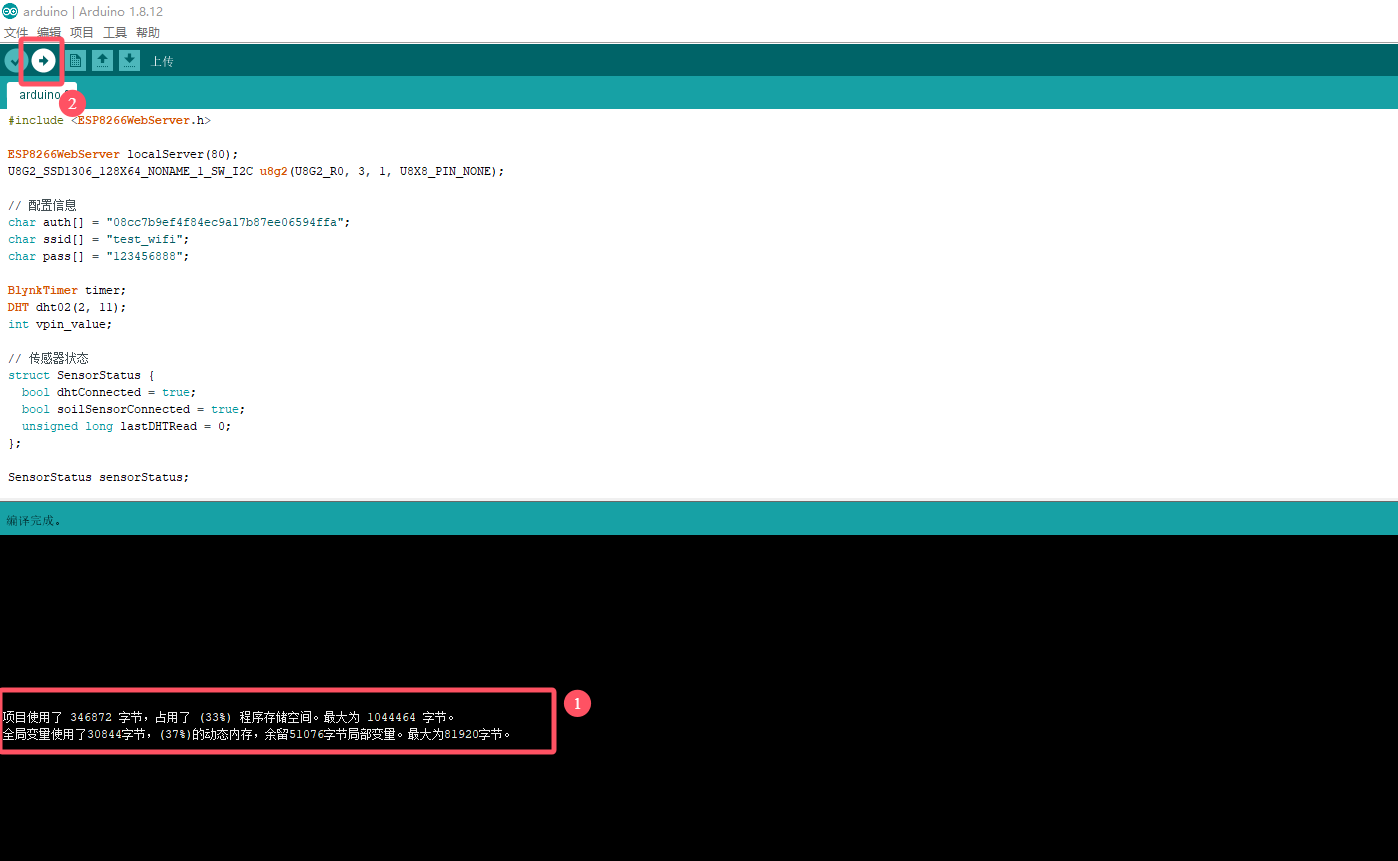
编译程序:①和②选择无误后,点击③,出现④表示程序正在编译

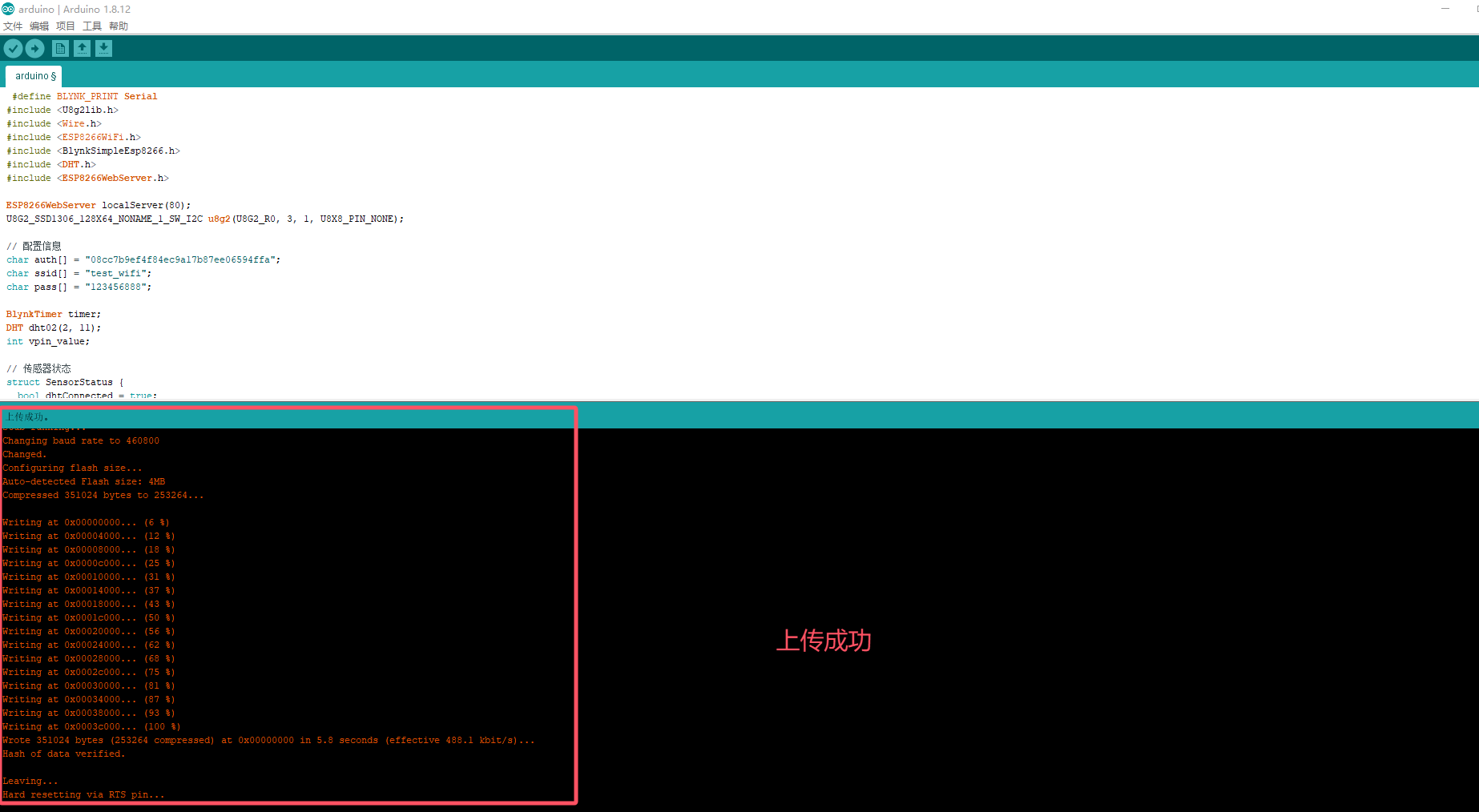
程序上传至开发板:出现①中白色字体内容,表示编程成功,点击②的按钮上传程序到开发板
程序烧录成功
STM32开发
1、CH340串口驱动
CH340资料链接: https://pan.baidu.com/s/10xkZRh0lhhMzrGsPKYjVlw?pwd=l9hj 提取码:l9hj
文件描述
USB转串口Windows一键式安装驱动程序,支持CH340和CH341,支持32/64位Windows 11/10/8.1/8/7/VISTA/XP,SERVER 2022/2019/2016/2012/2008/2003,2000/ME/98,通过微软数字签名认证,支持USB转UART的3线和9线SERIAL串口等,用于随产品发行到最终用户。
适用范围
CH340G,CH340T,CH340C,CH340N, CH340K, CH340E,CH340B,CH341A,CH341F, CH341T,CH341B,CH341C,CH341U
2、开发软件Keil
Keil uVision 5 MDK版软件安装包下载及安装教程
https://zhuanlan.zhihu.com/p/1903019173711418696
3、程序开发
// 主程序入口main.c
#include "sys.h"
#include "delay.h"
#include "gpio.h"
#include "OLED_I2C.h"
#include "ds18b20.h"
#include "usart1.h"
#include "usart3.h"
#include "esp8266.h"
#include "adc.h"
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#define RATIO 4.51/4.08
dataPoint_t DataPoint;
u8 tempSetVal=40; //温度上限
u8 shuaxin = 0; //刷新标志
u8 setFlag = 0; //设置标志
u16 Ph_min = 300,Ph_max = 900; //PH下限上限
u16 TurSetMax=1000; //浊度上限
unsigned long int avgValue; //Store the average value of the sensor feedback
char display[16];
void InitDisplay(void) //初始化显示
{
unsigned char i=0;
OLED_ShowStr(0, 2, "PH:", 2,0);
for(i=0;i<2;i++)OLED_ShowCN(i*16,4,i+0,0);//显示中文:温度
for(i=0;i<2;i++)OLED_ShowCN(i*16,6,i+2,0);//显示中文:浊度
OLED_ShowChar(32,4,':',2,0);
OLED_ShowChar(32,6,':',2,0);
}
void displaySetValue(void) //显示设置的值
{
if(setFlag == 1 ||setFlag == 2)
{
sprintf(display,"%5.2f",(float)Ph_min/100);
OLED_ShowStr(40, 4,(u8 *)display, 2,setFlag+1-1);
sprintf(display,"%5.2f",(float)Ph_max/100);
OLED_ShowStr(40, 6,(u8 *)display, 2,setFlag+1-2);
}
if(setFlag == 3)
{
sprintf(display,"%02d",tempSetVal);
OLED_ShowStr(40, 4,(u8 *)display, 2,setFlag+1-4);
}
if(setFlag == 4)
{
sprintf(display,"%04d",TurSetMax);
OLED_ShowStr(40, 4,(u8 *)display, 2,setFlag+1-5);
}
}
void keyscan(void) //按键扫描
{
unsigned char i=0;
if(KEY1 == 0) //设置键
{
delay_ms(20);
if(KEY1 == 0)
{
while(KEY1 == 0);
BEEP=0;
setFlag ++;
if(setFlag == 1)
{
OLED_CLS(); //清屏
for(i=0;i<2;i++)OLED_ShowCN(i*16+32,0,i+8,0);//显示中文:设置
OLED_ShowStr(62, 0, " PH", 2,0);
for(i=0;i<2;i++)OLED_ShowCN(i*16,4,i+4,0);//显示中文:下限
for(i=0;i<2;i++)OLED_ShowCN(i*16,6,i+6,0);//显示中文:上限
OLED_ShowChar(32,4,':',2,0);
OLED_ShowChar(32,6,':',2,0);
}
if(setFlag == 3)
{
for(i=0;i<2;i++)OLED_ShowCN(i*16+64,0,i+0,0);//显示中文:温度
for(i=0;i<2;i++)OLED_ShowCN(i*16,4,i+6,0);//显示中文:上限
OLED_ShowStr(56, 4, " ", 2,0);
OLED_ShowCentigrade(56, 4); //℃
OLED_ShowStr(0, 6, " ", 2,0);
}
if(setFlag == 4)
{
for(i=0;i<2;i++)OLED_ShowCN(i*16+64,0,i+2,0);//显示中文:浊度
OLED_ShowStr(72, 4, "NTU", 2,0);
}
if(setFlag >= 5)
{
setFlag = 0;
OLED_CLS(); //清屏
InitDisplay();
}
displaySetValue();
}
}
if(KEY2 == 0) //加键
{
delay_ms(100);
if(KEY2 == 0)
{
if(setFlag == 1)
{
if(Ph_max-Ph_min > 10)Ph_min+=10;
}
if(setFlag == 2)
{
if(Ph_max < 1400)Ph_max+=10;
}
if(setFlag == 3)
{
if(tempSetVal<99)tempSetVal++;
}
if(setFlag == 4)
{
if(TurSetMax<3000)TurSetMax+=10;
}
displaySetValue(); //显示没有设置值
}
}
if(KEY3 == 0) //减键
{
delay_ms(100);
if(KEY3 == 0)
{
if(setFlag == 1)
{
if(Ph_min >= 10)Ph_min-=10;
}
if(setFlag == 2)
{
if(Ph_max-Ph_min > 10)Ph_max-=10;
}
if(setFlag == 3)
{
if(tempSetVal>0)tempSetVal--;
}
if(setFlag == 4)
{
if(TurSetMax>=10)TurSetMax-=10;
}
displaySetValue(); //显示没有设置值
}
}
}
void Get_PH(void) //获取PH
{
u16 buf[10];//buffer for read analog
u8 i,j;
float phValue=0.0;
for(i=0;i<10;i++) //Get 10 sample value from the sensor for smooth the value
{
buf[i]=Get_Adc_Average(ADC_Channel_8,10);
}
for(i=0;i<9;i++) //sort the analog from small to large
{
for(j=i+1;j<10;j++)
{
if(buf[i]>buf[j])
{
int temp=buf[i];
buf[i]=buf[j];
buf[j]=temp;
}
}
}
avgValue=0;
for(i=2;i<8;i++) //take the average value of 6 center sample
avgValue+=buf[i];
phValue=((float)avgValue*5.0/4095/6)*RATIO; //convert the analog into millivolt
DataPoint.PH=(phValue*(-5.290))+23.053; //convert the millivolt into pH value
DataPoint.PH=DataPoint.PH*100;
if(DataPoint.PH<0.0)DataPoint.PH=0.0;
if(DataPoint.PH>1400.0)DataPoint.PH=1400.0;
}
void Get_Turbidity(void) //获取浑浊度
{
float T;
u16 adcx = 0;
adcx = Get_Adc_Average(ADC_Channel_9,20);//读取AD值
T = adcx;
T = T*(3.3/4096)+1.72;
if(T < 2.5)
{
T = 3000;
}
else
{
T = (-1120.4*T*T+5742.3*T-4352.9); //Tul是AD值
}
if(T < 0)
{
T = 0;
}
DataPoint.Turbidity = (u16)T;
if(DataPoint.Turbidity > 3000)DataPoint.Turbidity = 3000;
}
int main(void)
{
u16 timeCount1 = 300;
u16 timeCount2 = 10;
u8 shanshuo=0;
delay_init(); //延时函数初始化
NVIC_Configuration(); //中断优先级配置
delay_ms(200);
I2C_Configuration(); //IIC初始化
Adc_Init(); //ADC初始化
OLED_Init(); //OLED液晶初始化
OLED_CLS(); //清屏
OLED_ShowStr(0, 2," loading... ", 2,0);
ESP8266_Init();
OLED_CLS(); //清屏
InitDisplay();
KEY_GPIO_Init(); //按键引脚初始化
DS18B20_GPIO_Init();
DS18B20_Init(); //初始化显示
uart1_Init(9600);
while(1)
{
keyscan(); //按键扫描
timeCount1 ++;
if(timeCount1 >= 300 && !setFlag) //延时一段时间读取
{
timeCount1 = 0;
shanshuo=!shanshuo;
Get_PH() ; //获取PH
/*超限的时候闪烁显示*/
if((DataPoint.PH<=Ph_min || DataPoint.PH>=Ph_max) && shanshuo)
{
OLED_ShowStr(32, 2," ", 2,0);
}
else
{
sprintf(display,"%5.2f ",(float)DataPoint.PH/100);
OLED_ShowStr(32, 2,(u8 *)display, 2,0);
}
DataPoint.temperature = ReadTemperature();//读取温度
/*超限的时候闪烁显示*/
if((DataPoint.temperature>=tempSetVal) && shanshuo)
{
OLED_ShowStr(40, 4," ", 2,0);
}
else
{
sprintf(display,"%02d",DataPoint.temperature);
OLED_ShowStr(40, 4,(u8 *)display, 2,0);
OLED_ShowCentigrade(56, 4); //℃
}
Get_Turbidity() ;
/*超限的时候闪烁显示*/
if((DataPoint.Turbidity>=TurSetMax) && shanshuo)
{
OLED_ShowStr(40, 6," ", 2,0);
}
else
{
sprintf(display,"%dNTU ",DataPoint.Turbidity);
OLED_ShowStr(40, 6,(u8 *)display, 2,0);
}
if((DataPoint.PH<=Ph_min || DataPoint.PH>=Ph_max)||(DataPoint.temperature>=tempSetVal)||(DataPoint.Turbidity>=TurSetMax))BEEP= ~BEEP;else BEEP=0; //超限蜂鸣器报警
}
timeCount2 ++;
if(timeCount2 >= 900)
{
timeCount2 = 0;
CloudPlatform_SendData(&DataPoint); //上报数据到云平台
}
delay_ms(1);
}
}
// WIFI模块 esp8266.c
#include "stm32f10x.h"
#include "usart3.h"
#include "esp8266.h"
#include "delay.h"
#include <string.h>
#include <stdio.h>
#define ESP8266_BUF Usart3RecBuf
#define ESP8266_CNT Rx3Counter
#define STM32_RX1BUFF_SIZE USART3_RXBUFF_SIZE
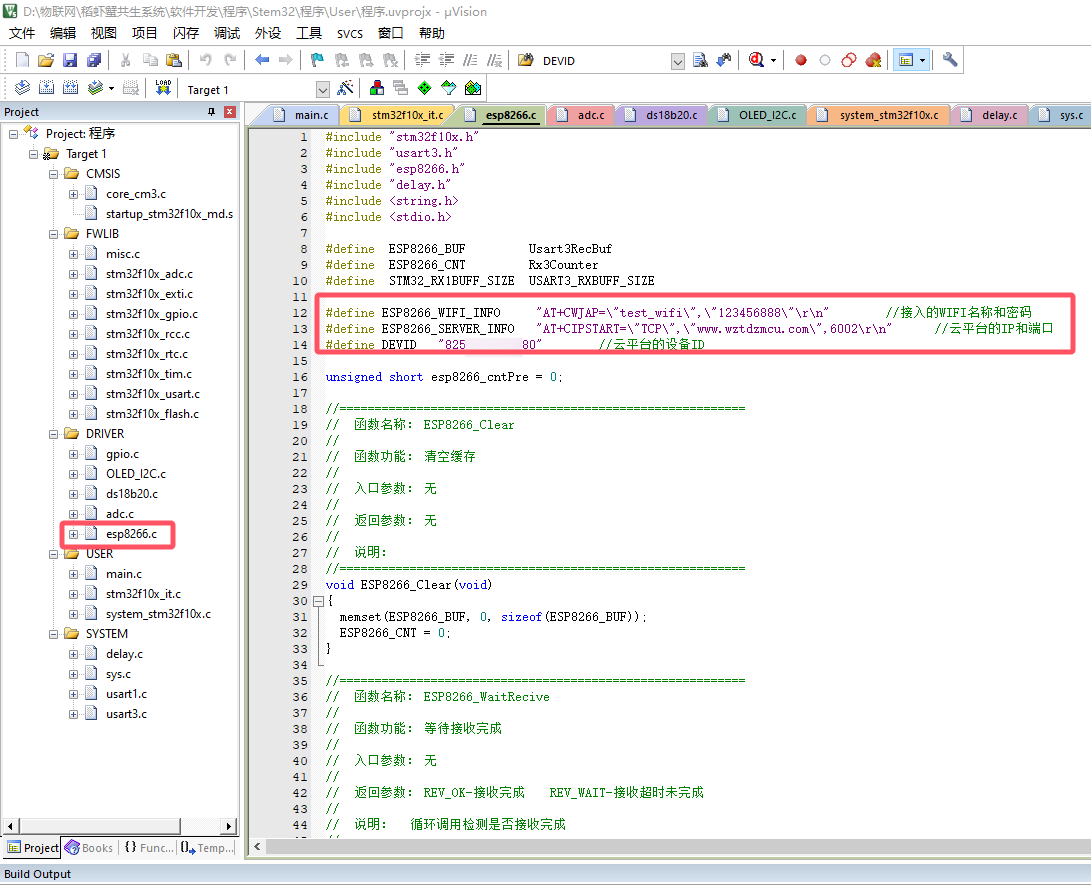
#define ESP8266_WIFI_INFO "AT+CWJAP=\"test_wifi\",\"123456888\"\r\n" //接入的WIFI名称和密码
#define ESP8266_SERVER_INFO "AT+CIPSTART=\"TCP\",\"www.wztdzmcu.com\",6002\r\n" //云平台的IP和端口
#define DEVID "82525****3680" //云平台的设备ID
unsigned short esp8266_cntPre = 0;
//==========================================================
// 函数名称: ESP8266_Clear
//
// 函数功能: 清空缓存
//
// 入口参数: 无
//
// 返回参数: 无
//
// 说明:
//==========================================================
void ESP8266_Clear(void)
{
memset(ESP8266_BUF, 0, sizeof(ESP8266_BUF));
ESP8266_CNT = 0;
}
//==========================================================
// 函数名称: ESP8266_WaitRecive
//
// 函数功能: 等待接收完成
//
// 入口参数: 无
//
// 返回参数: REV_OK-接收完成 REV_WAIT-接收超时未完成
//
// 说明: 循环调用检测是否接收完成
//==========================================================
_Bool ESP8266_WaitRecive(void)
{
if(ESP8266_CNT == 0) //如果接收计数为0 则说明没有处于接收数据中,所以直接跳出,结束函数
return REV_WAIT;
if(ESP8266_CNT == esp8266_cntPre) //如果上一次的值和这次相同,则说明接收完毕
{
ESP8266_CNT = 0; //清0接收计数
return REV_OK; //返回接收完成标志
}
esp8266_cntPre = ESP8266_CNT; //置为相同
return REV_WAIT; //返回接收未完成标志
}
//==========================================================
// 函数名称: ESP8266_SendCmd
//
// 函数功能: 发送命令
//
// 入口参数: cmd:命令
// res:需要检查的返回指令
//
// 返回参数: 0-成功 1-失败
//
// 说明:
//==========================================================
_Bool ESP8266_SendCmd(char *cmd, char *res, u16 time)
{
uart3_send((unsigned char *)cmd,strlen((const char *)cmd));
while(time--)
{
if(ESP8266_WaitRecive() == REV_OK) //如果收到数据
{
if(strstr((const char *)ESP8266_BUF, res) != NULL) //如果检索到关键词
{
ESP8266_Clear(); //清空缓存
return 0;
}
}
delay_ms(1);
}
return 1;
}
//==========================================================
// 函数名称: ESP8266_SendData
//
// 函数功能: 发送数据
//
// 入口参数: data:数据
// len:长度
//
// 返回参数: 无
//
// 说明:
//==========================================================
void ESP8266_SendData(unsigned char *data, unsigned short len)
{
char cmdBuf[32];
ESP8266_Clear(); //清空接收缓存
sprintf(cmdBuf, "AT+CIPSEND=%d\r\n", len); //发送命令
if(!ESP8266_SendCmd(cmdBuf, ">", 200)) //收到‘>’时可以发送数据
{
uart3_send(data , len); //发送设备连接请求数据
}
}
//==========================================================
// 函数名称: CloudPlatform_SendData
//
// 函数功能: 上传数据到平台
//
// 返回参数: 无
//
// 说明:
//==========================================================
void CloudPlatform_SendData(const dataPoint_t * const data)
{
char cmdBuf[512],buf[128];
unsigned char len=0;
memset(cmdBuf, 0, sizeof(cmdBuf));
sprintf(cmdBuf,"MQTT|%s|test|",DEVID);
len = strlen(cmdBuf);
cmdBuf[len] = '{';
memset(buf, 0, sizeof(buf));
sprintf(buf,"\"ph\":%.2f,",(float)(data->PH)/100);
strcat(cmdBuf, buf);
memset(buf, 0, sizeof(buf));
sprintf(buf,"\"temp\":%d,",data->temperature);
strcat(cmdBuf, buf);
memset(buf, 0, sizeof(buf));
sprintf(buf,"\"tur\":%d",data->Turbidity);
strcat(cmdBuf, buf);
len = strlen(cmdBuf);
cmdBuf[len] = '}';
strcat(cmdBuf, "\r\n");
len = strlen(cmdBuf);
ESP8266_SendData((unsigned char *)cmdBuf, len);
}
//==========================================================
// 函数名称: ESP8266_GetIPD
//
// 函数功能: 获取平台返回的数据
//
// 入口参数: 等待的时间(乘以10ms)
//
// 返回参数: 平台返回的原始数据
//
// 说明: 不同网络设备返回的格式不同,需要去调试
// 如ESP8266的返回格式为 "+IPD,x:yyy" x代表数据长度,yyy是数据内容
//==========================================================
unsigned char *ESP8266_GetIPD(unsigned short timeOut)
{
char *ptrIPD = NULL;
do
{
if(ESP8266_WaitRecive() == REV_OK) //如果接收完成
{
ptrIPD = strstr((char *)ESP8266_BUF, "IPD,"); //搜索“IPD”头
if(ptrIPD == NULL) //如果没找到,可能是IPD头的延迟,还是需要等待一会,但不会超过设定的时间
{
//printf("\"IPD\" not found\r\n");
}
else
{
ptrIPD = strchr(ptrIPD, ':'); //找到':'
if(ptrIPD != NULL)
{
ptrIPD++;
return (unsigned char *)(ptrIPD);
}
else
return NULL;
}
}
delay_ms(5); //延时等待
} while(timeOut--);
return NULL; //超时还未找到,返回空指针
}
//==========================================================
// 函数名称: ESP8266_Init
//
// 函数功能: 初始化ESP8266
//
// 入口参数: 无
//
// 返回参数: 无
//
// 说明:
//==========================================================
void ESP8266_Init(void)
{
USART3_Init(115200); //串口初始化
ESP8266_Clear();
while(ESP8266_SendCmd("AT\r\n\r", "OK", 500)) //测试
delay_ms(500);
while(ESP8266_SendCmd("AT+RESTORE\r\n", "OK", 2000)) //先清除一下数据
delay_ms(1000);
while(ESP8266_SendCmd("AT+RST\r\n\r", "ready", 1000)) //复位
delay_ms(500);
while(ESP8266_SendCmd("AT+CWMODE=1\r\n", "OK", 500)) //设置为STA模式
delay_ms(1000);
while(ESP8266_SendCmd(ESP8266_WIFI_INFO, "WIFI CONNECTED", 2000)) //设置wifi名称,密码
delay_ms(1000);
delay_ms(1000);
do
{
if(ESP8266_WaitRecive() == REV_OK)
{
if(strstr((char *)ESP8266_BUF, "WIFI GOT IP")!=NULL) //等待WIFI连接成功
{
break;
}
}
delay_ms(1000);
}while(1);
while(ESP8266_SendCmd(ESP8266_SERVER_INFO, "CONNECT", 1000)) //接入服务器
delay_ms(1000);
delay_ms(1000);
}
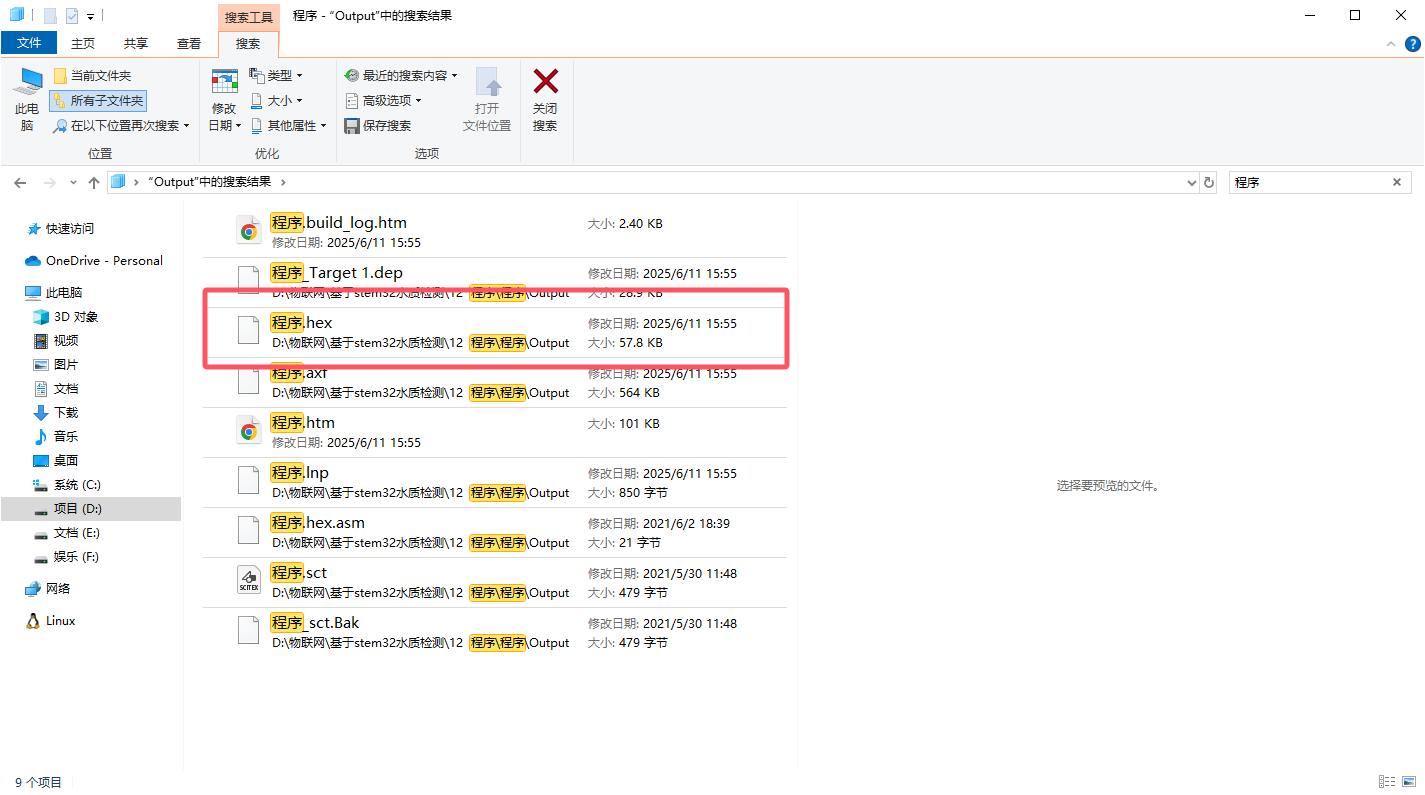
4、程序构建
修改程序参数:接入的WIFI名称和密码、云平台的IP和端口、平台设备ID
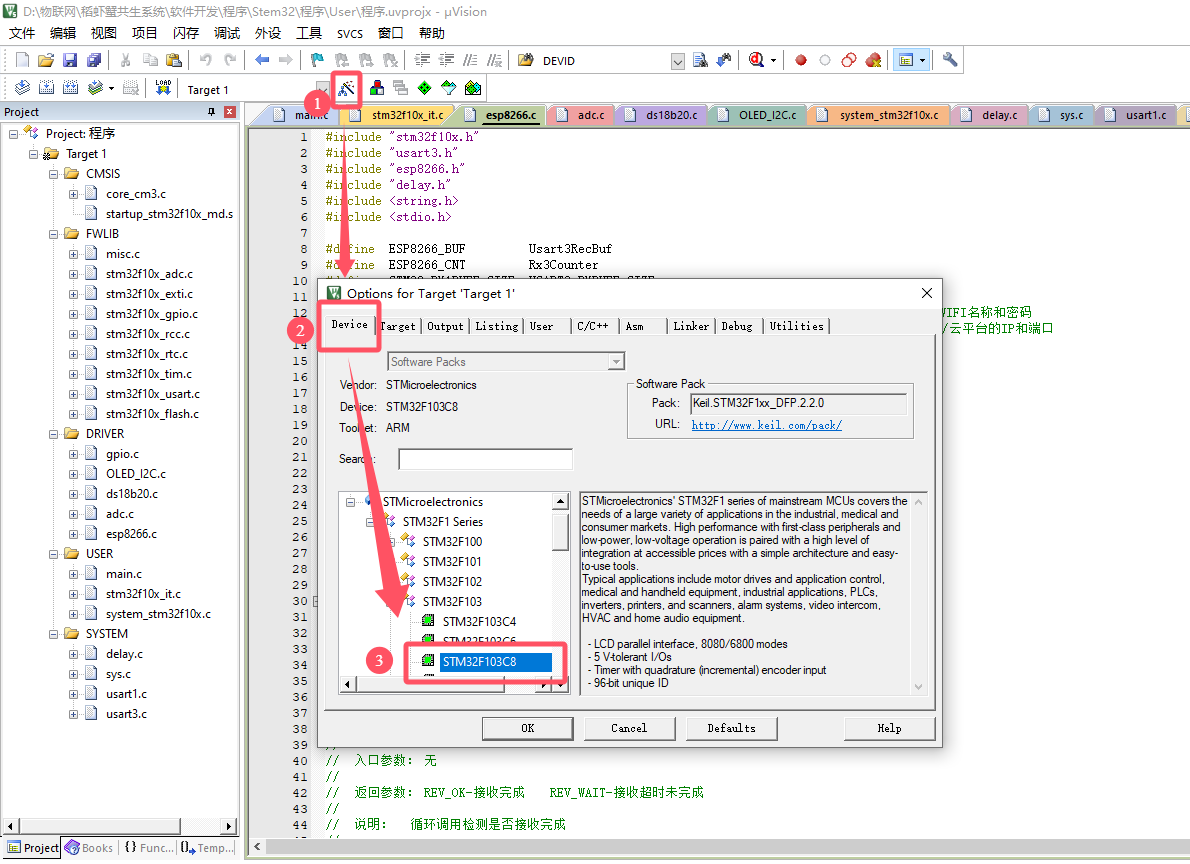
配置目标选项:
点击①目标选项按钮-->点击②Device按钮-->选择③STM32F103C8
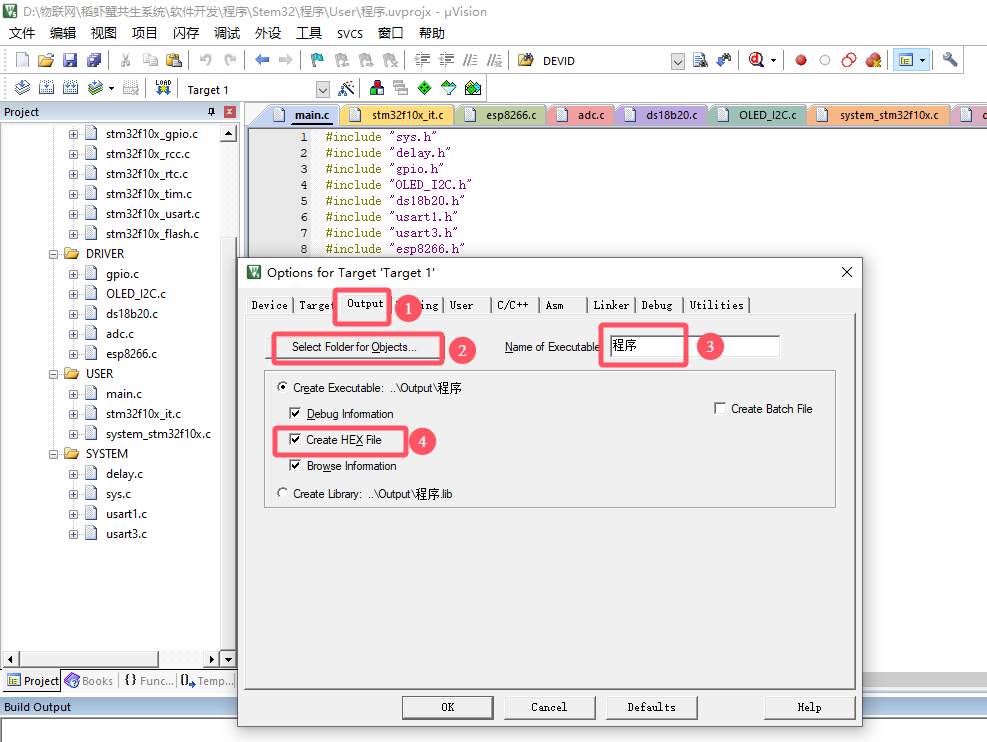
继续选择①Output选项-->点击②选择输出文件位置-->填写③输出的文件名-->勾选④创建HEX文件
点击①构建,出现②程序构建成功
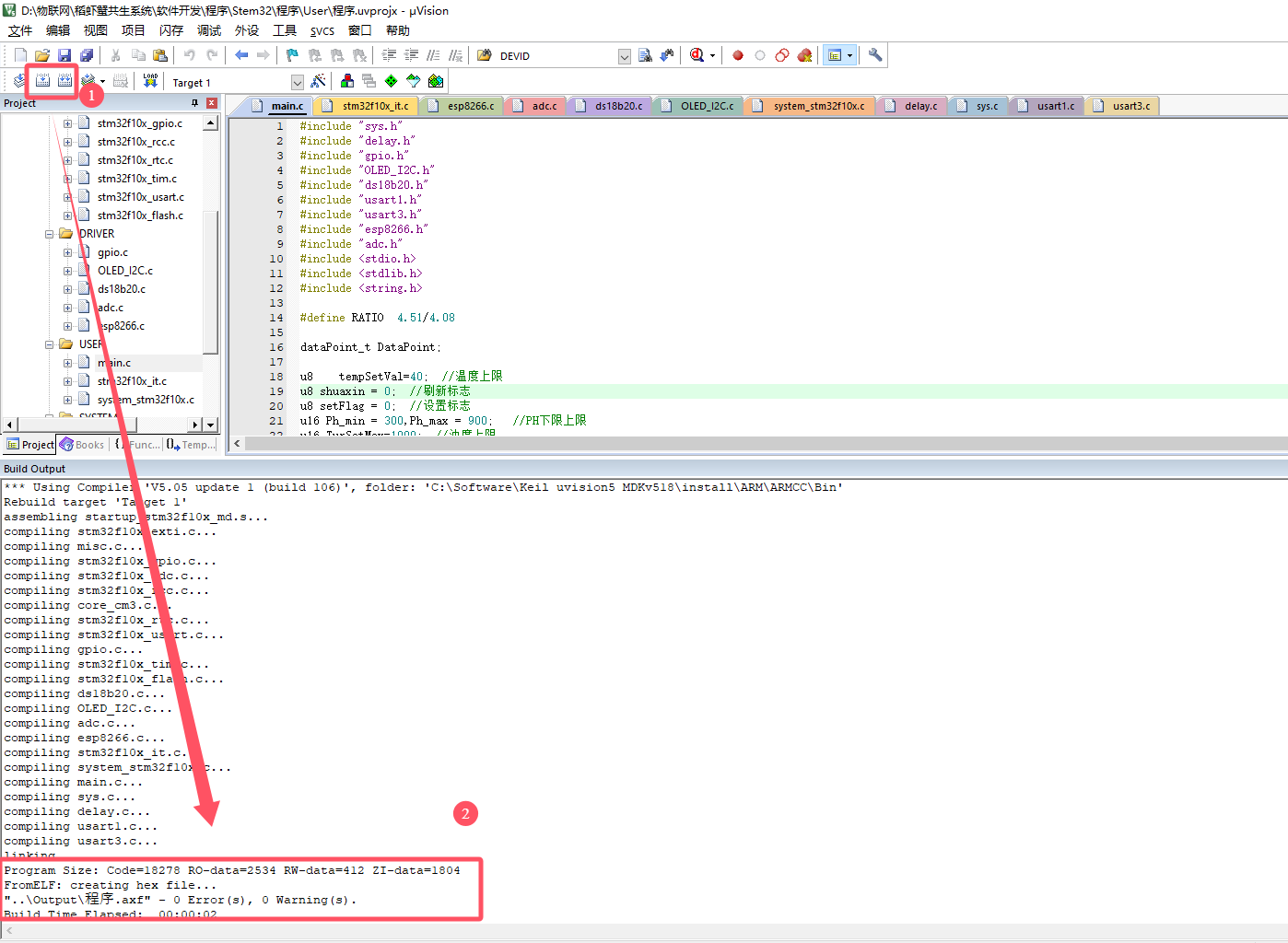
找到可烧录的单片机程序
5、烧录步骤
使用USB转TTL串口下载器链接STM32
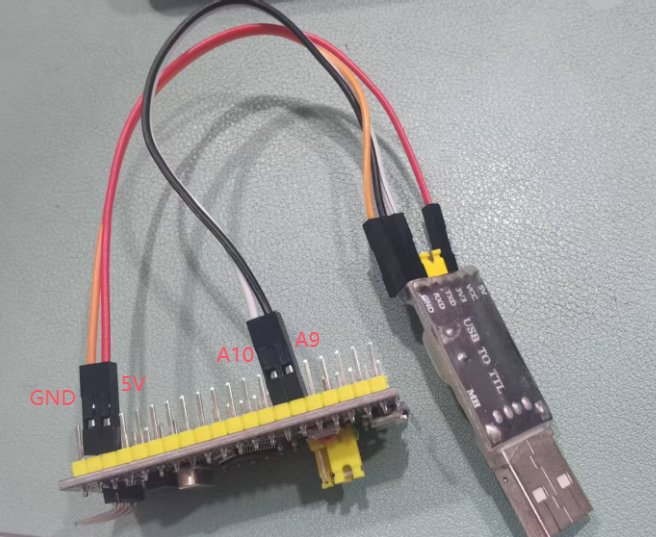
| 串口下载器 | STM32 |
|---|---|
| 5V | 5V |
| GND | GND |
| TXD | A10 |
| RXD | A9 |
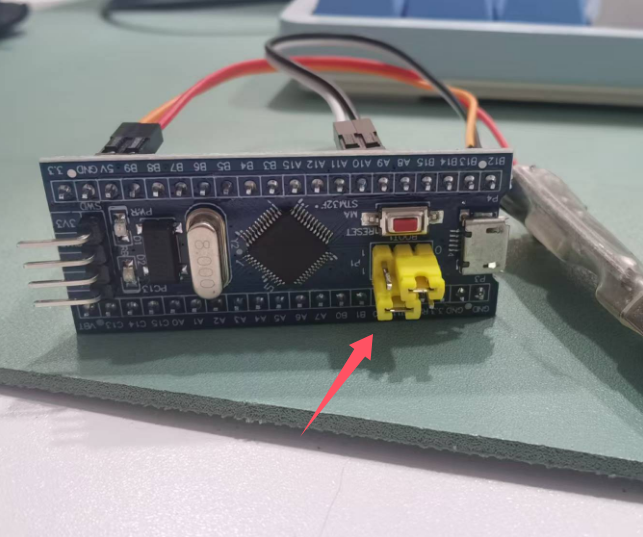
| BOOT0切到1,烧录程序后复原 |
链接到电脑
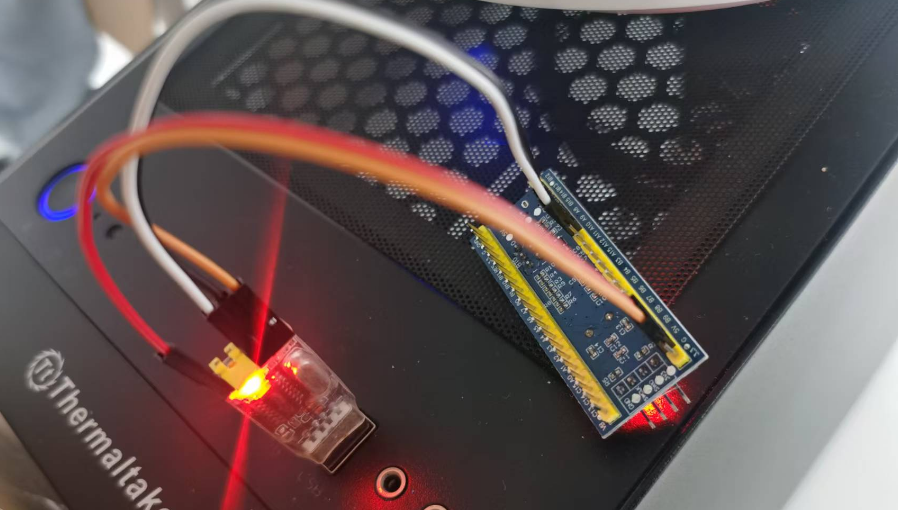
查询串行端口
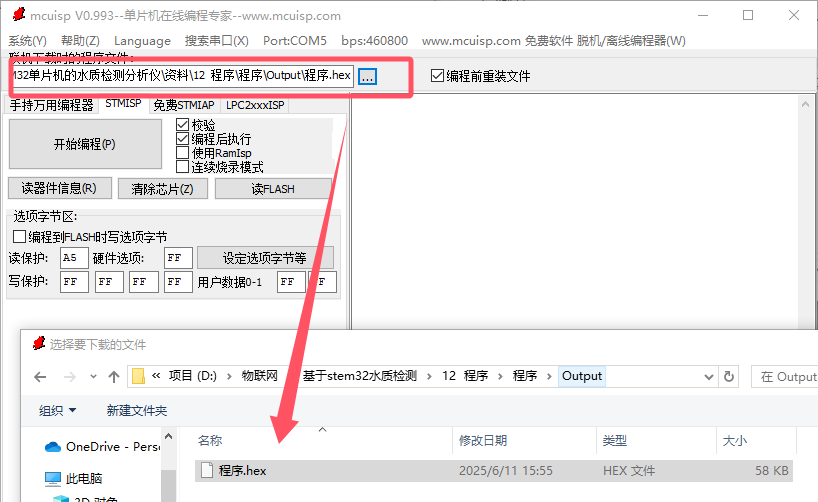
打开mcuisp烧录软件,选择HEX烧录程序
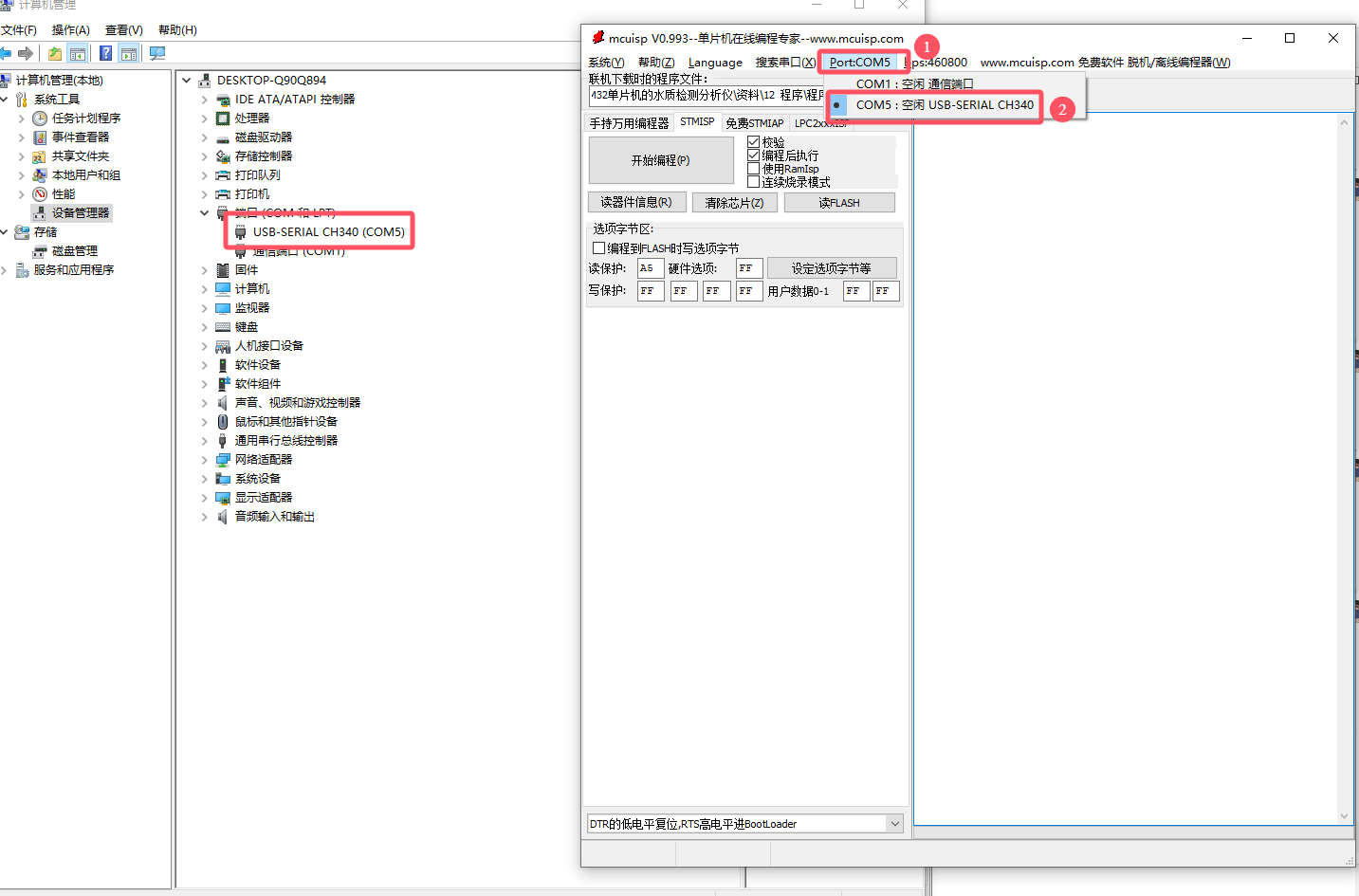
在mcuisp选项栏选择PROT-->选择查询到串行端口
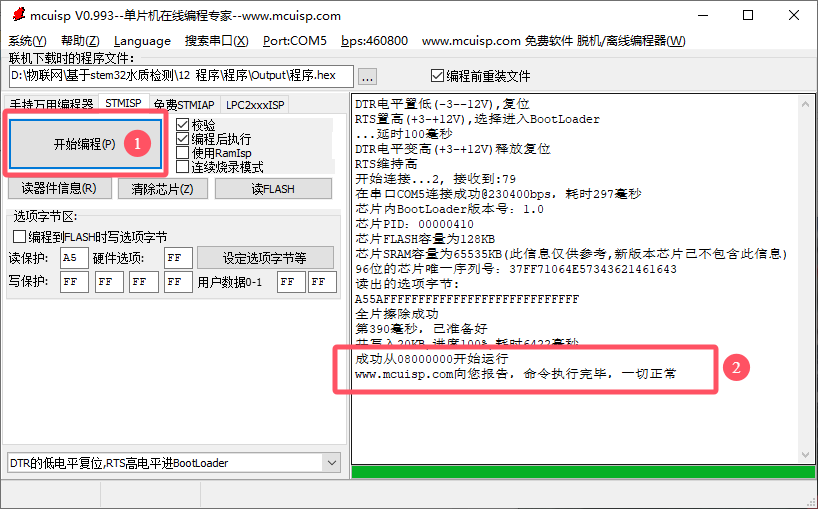
按下①开始编程,烧录程序,如果在等待没反映,按下STM32开发板上的RESET按钮,出现②表示程序烧录成功
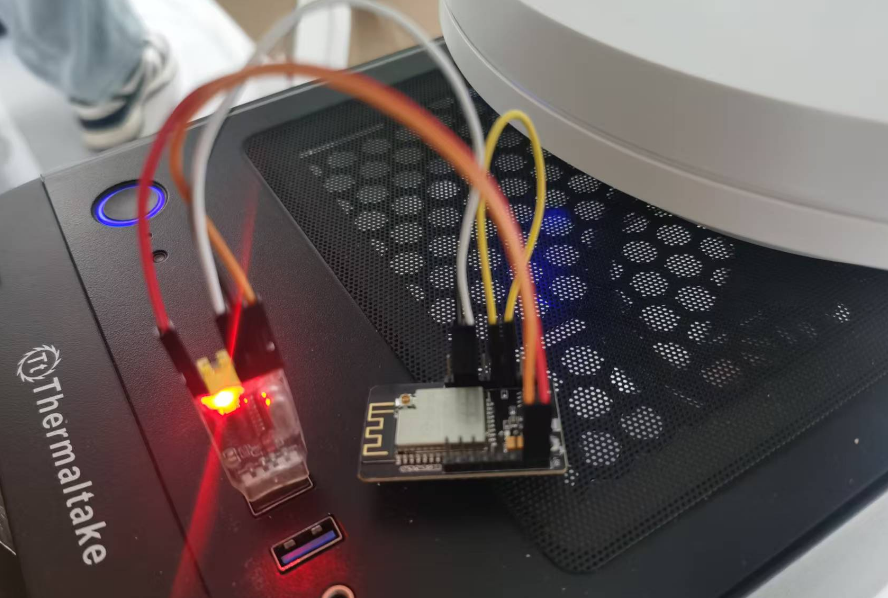
ESP32-CAM摄像头开发
1、CH340串口驱动
CH340资料链接: https://pan.baidu.com/s/10xkZRh0lhhMzrGsPKYjVlw?pwd=l9hj 提取码:l9hj
文件描述
USB转串口Windows一键式安装驱动程序,支持CH340和CH341,支持32/64位Windows 11/10/8.1/8/7/VISTA/XP,SERVER 2022/2019/2016/2012/2008/2003,2000/ME/98,通过微软数字签名认证,支持USB转UART的3线和9线SERIAL串口等,用于随产品发行到最终用户。
适用范围
CH340G,CH340T,CH340C,CH340N, CH340K, CH340E,CH340B,CH341A,CH341F, CH341T,CH341B,CH341C,CH341U
2、开发软件arduino
安装Arduino IDE 、ESP32离线包、ESP8266离线包
Arduino IDE软件esp32+esp8266离线安装包链接:https://pan.baidu.com/s/1LymkbGFzdjkwvs4E7MMi2g?pwd=8889
添加附加开发板地址打开Arduino IDE菜单 > 文件 >首选项,在 附加开发板管理器网址 输入框中,填入以下网址:
https://arduino.me/packages/esp32.json
https://arduino.me/packages/esp8266.json
3、程序开发
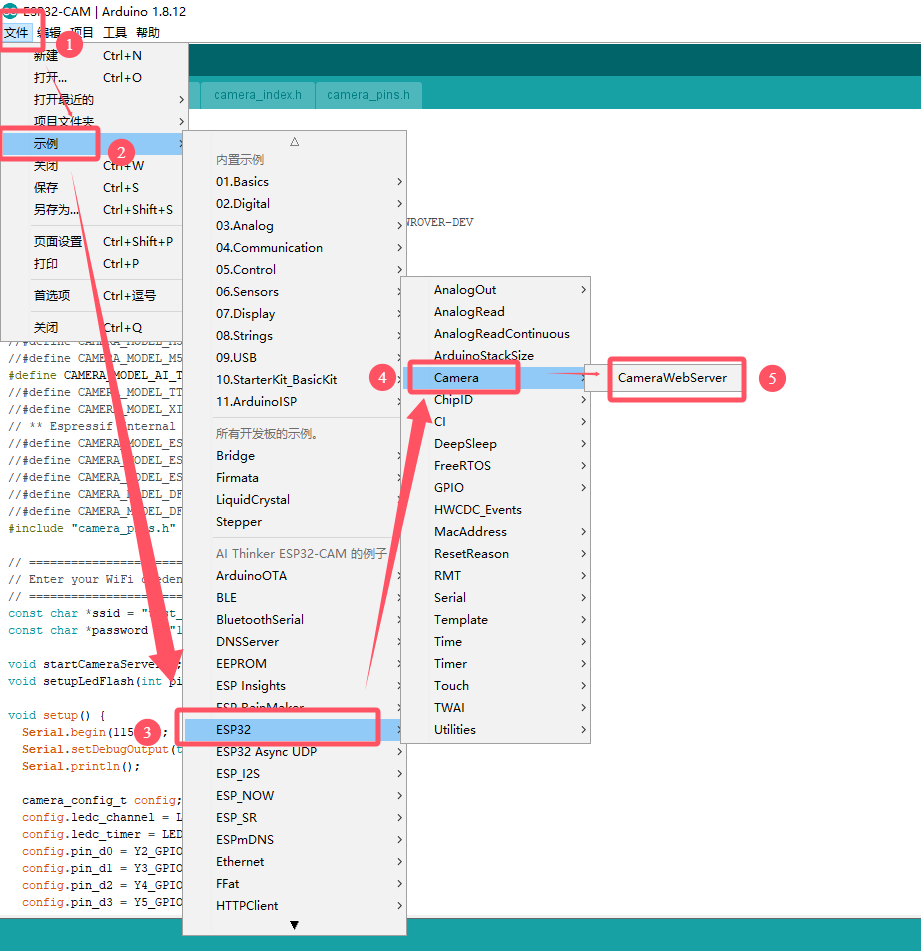
选择ESP32-CAM示例:文件-->示例-->ESP32-->Camera-->CameraWebServer
生成四个文件
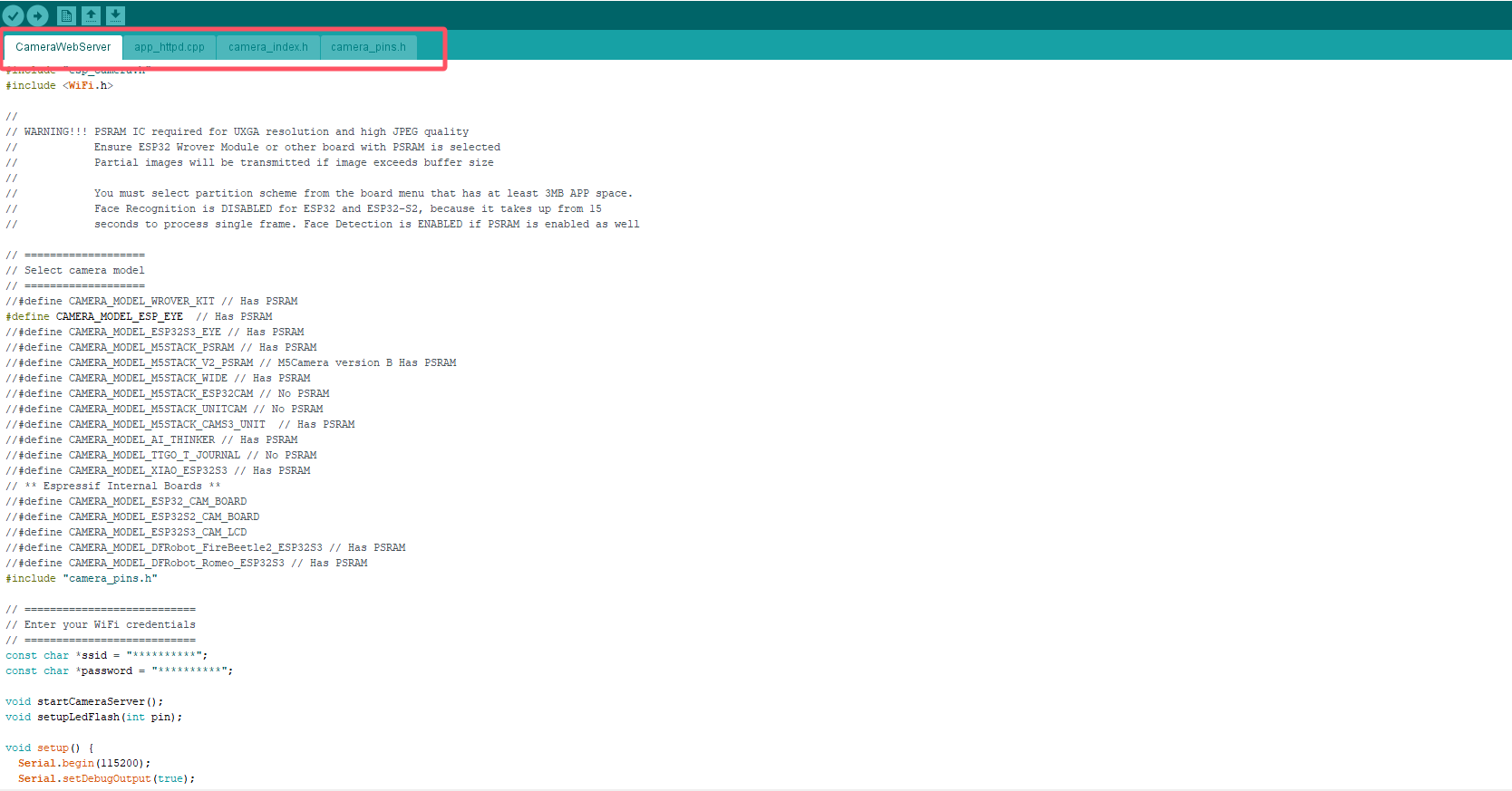
替换CameraWebServer.ino中的代码程序
#include "esp_camera.h"
#include <WiFi.h>
#define CAMERA_MODEL_AI_THINKER // Has PSRAM 这是ESP32-CAM
#include "camera_pins.h"
// ===========================
// Enter your WiFi credentials
// ===========================
const char *ssid = "test_wifi";
const char *password = "123456888";
void startCameraServer();
void setupLedFlash(int pin);
void setup() {
Serial.begin(115200);
Serial.setDebugOutput(true);
Serial.println();
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sccb_sda = SIOD_GPIO_NUM;
config.pin_sccb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.frame_size = FRAMESIZE_UXGA;
config.pixel_format = PIXFORMAT_JPEG; // for streaming
//config.pixel_format = PIXFORMAT_RGB565; // for face detection/recognition
config.grab_mode = CAMERA_GRAB_WHEN_EMPTY;
config.fb_location = CAMERA_FB_IN_PSRAM;
config.jpeg_quality = 12;
config.fb_count = 1;
// if PSRAM IC present, init with UXGA resolution and higher JPEG quality
// for larger pre-allocated frame buffer.
if (config.pixel_format == PIXFORMAT_JPEG) {
if (psramFound()) {
config.jpeg_quality = 10;
config.fb_count = 2;
config.grab_mode = CAMERA_GRAB_LATEST;
} else {
// Limit the frame size when PSRAM is not available
config.frame_size = FRAMESIZE_SVGA;
config.fb_location = CAMERA_FB_IN_DRAM;
}
} else {
// Best option for face detection/recognition
config.frame_size = FRAMESIZE_240X240;
#if CONFIG_IDF_TARGET_ESP32S3
config.fb_count = 2;
#endif
}
#if defined(CAMERA_MODEL_ESP_EYE)
pinMode(13, INPUT_PULLUP);
pinMode(14, INPUT_PULLUP);
#endif
// camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
return;
}
sensor_t *s = esp_camera_sensor_get();
// initial sensors are flipped vertically and colors are a bit saturated
if (s->id.PID == OV3660_PID) {
s->set_vflip(s, 1); // flip it back
s->set_brightness(s, 1); // up the brightness just a bit
s->set_saturation(s, -2); // lower the saturation
}
// drop down frame size for higher initial frame rate
if (config.pixel_format == PIXFORMAT_JPEG) {
s->set_framesize(s, FRAMESIZE_QVGA);
}
#if defined(CAMERA_MODEL_M5STACK_WIDE) || defined(CAMERA_MODEL_M5STACK_ESP32CAM)
s->set_vflip(s, 1);
s->set_hmirror(s, 1);
#endif
#if defined(CAMERA_MODEL_ESP32S3_EYE)
s->set_vflip(s, 1);
#endif
// Setup LED FLash if LED pin is defined in camera_pins.h
#if defined(LED_GPIO_NUM)
setupLedFlash(LED_GPIO_NUM);
#endif
WiFi.begin(ssid, password);
WiFi.setSleep(false);
Serial.print("WiFi connecting");
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
startCameraServer();
// 点亮 ESP32-CAM 板载 LED 灯
pinMode(4, OUTPUT);
digitalWrite(4, HIGH);
Serial.print("Camera Ready! Use 'http://");
Serial.print(WiFi.localIP());
Serial.println("' to connect");
}
void loop() {
// Do nothing. Everything is done in another task by the web server
delay(10000);
}
4、烧录步骤
使用USB转TTL串口下载器链接ESP32-CAM开发板
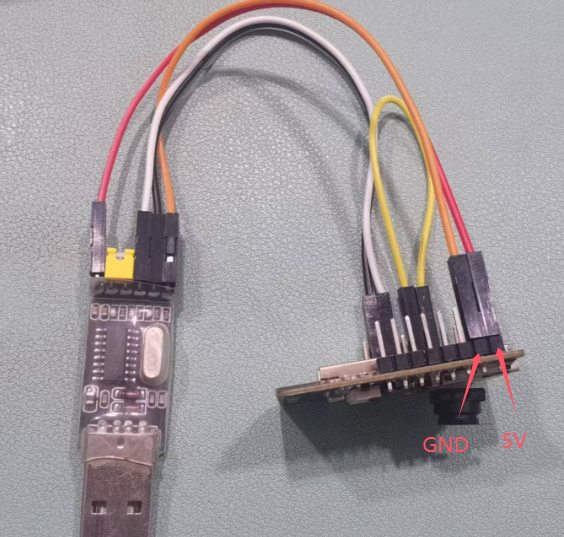
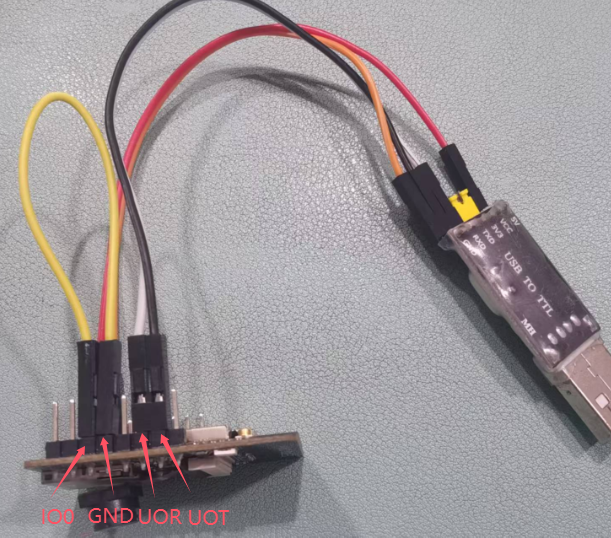
| 串口下载器 | ESP32-CAM |
|---|---|
| 5V | 5V |
| GND | GND |
| TXD | UOR |
| RXD | UOT |
| IO0和GND短接(烧录完成后移除) |
链接到电脑
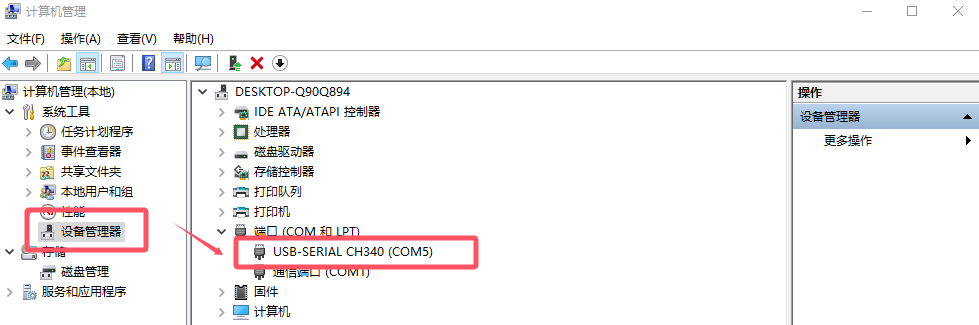
查询串行端口
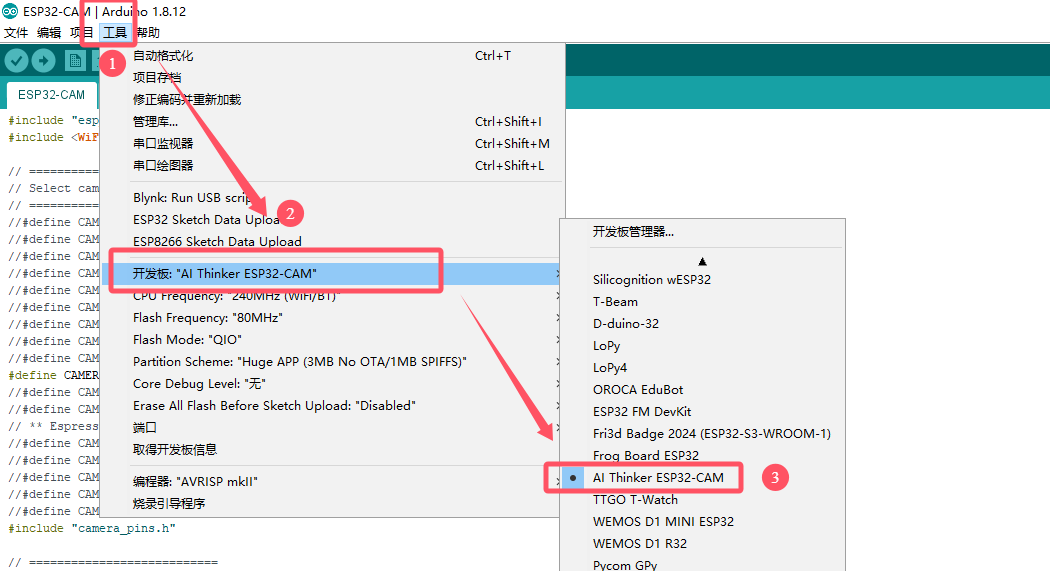
选择库:工具-->开发板-->AI Thinker ESP32-CAM
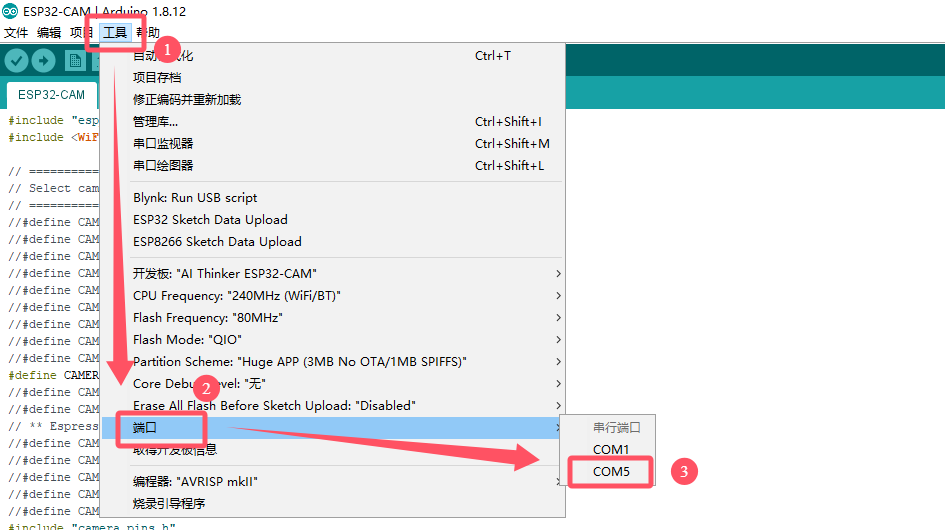
开发工具中选择端口:工具-->端口-->串行端口
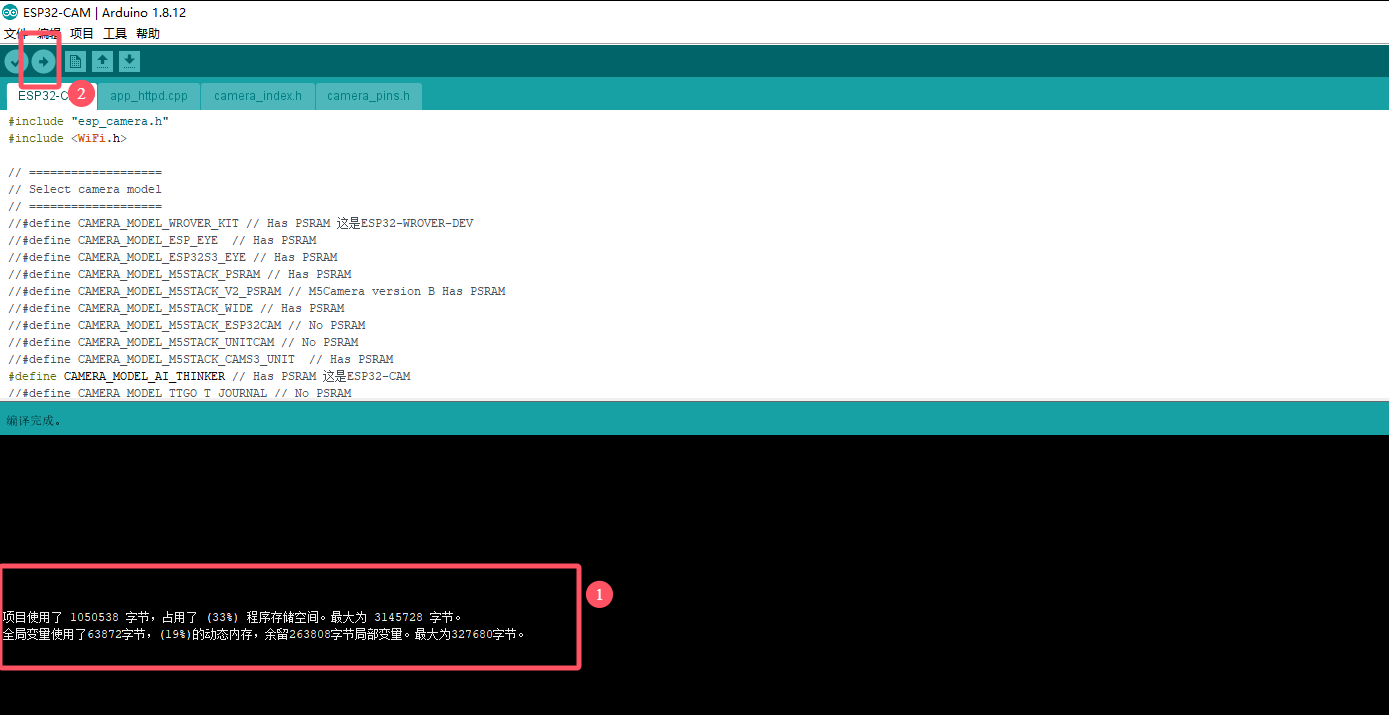
编译程序:①和②选择无误后,点击③,出现④表示程序正在编译
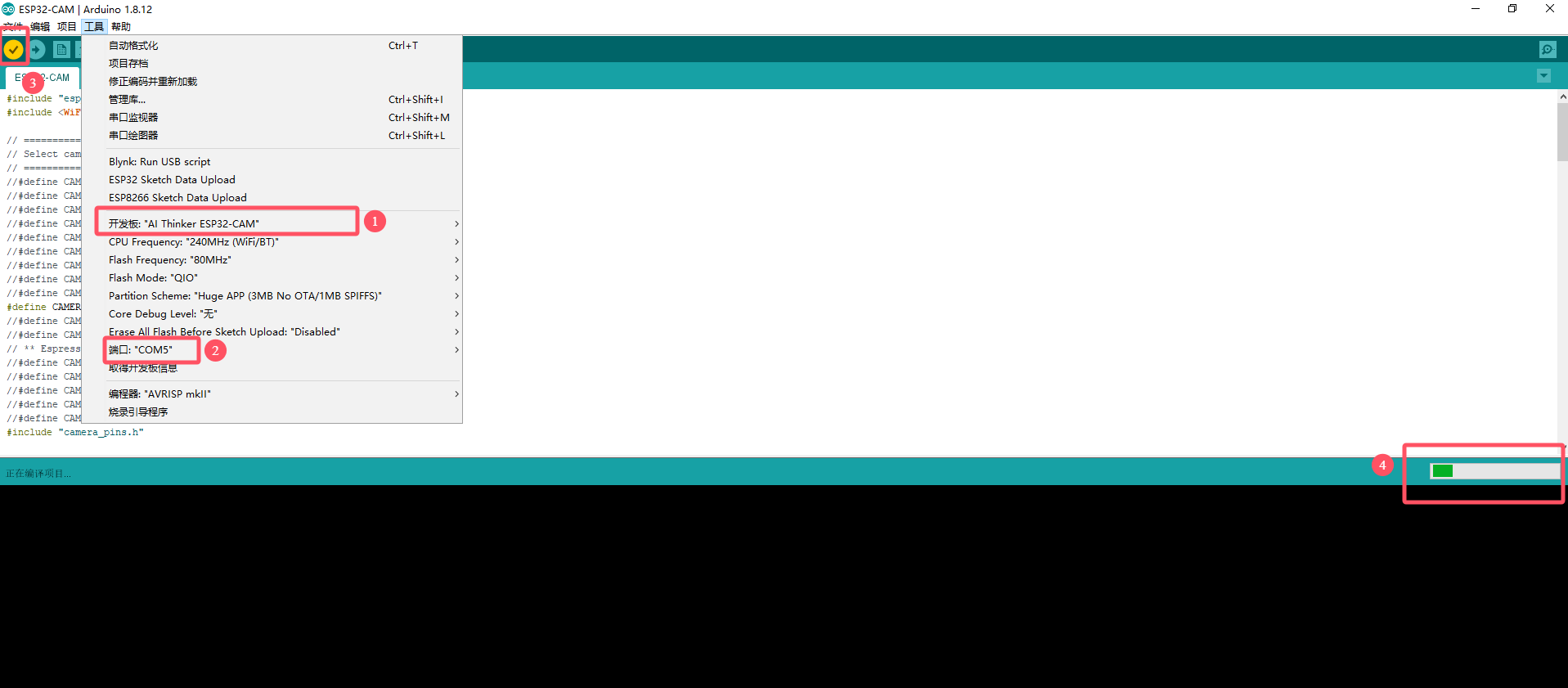
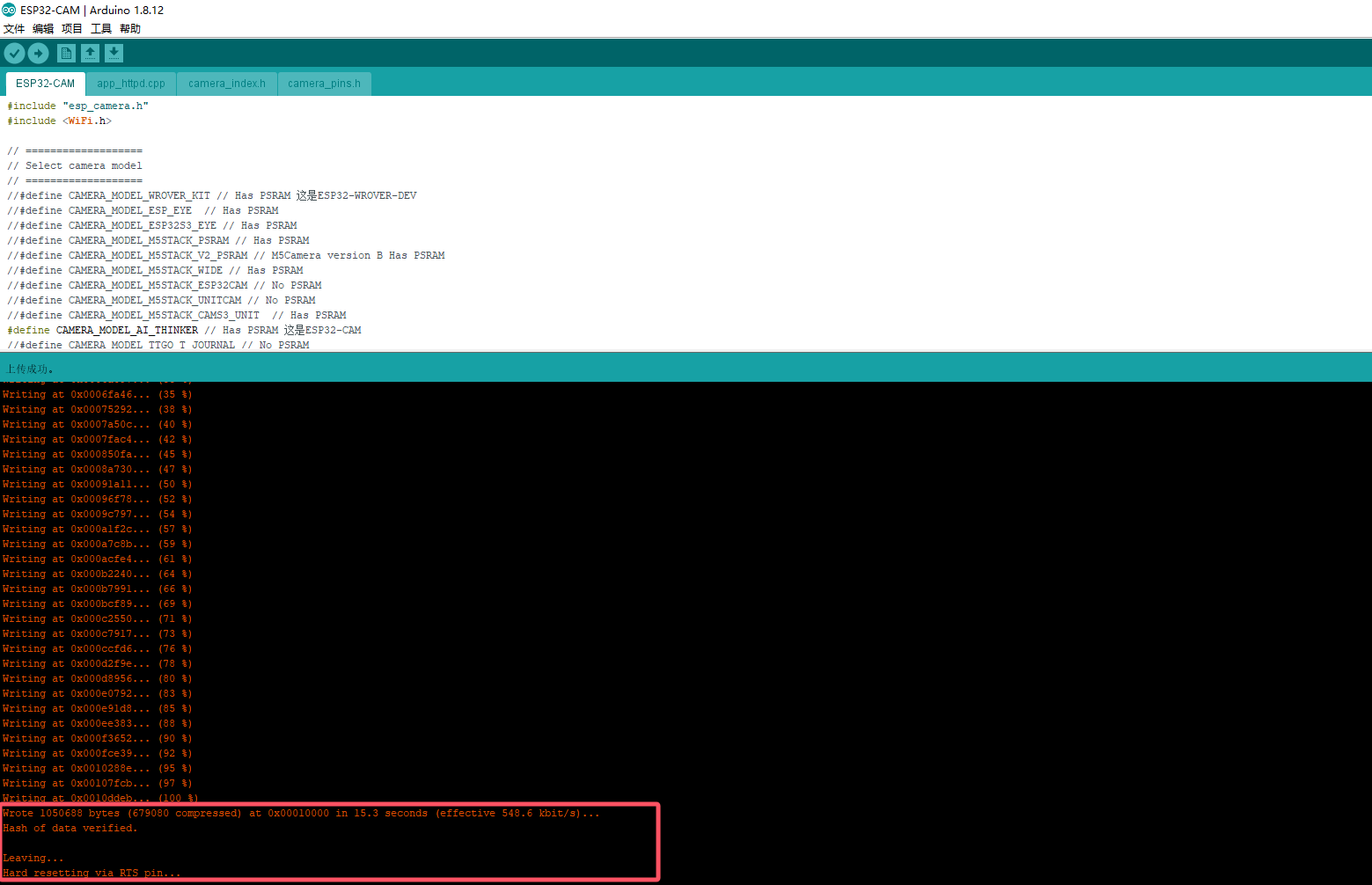
程序上传至开发板:出现①中白色字体内容,表示编程成功,点击②的按钮上传程序到开发板
程序烧录成功
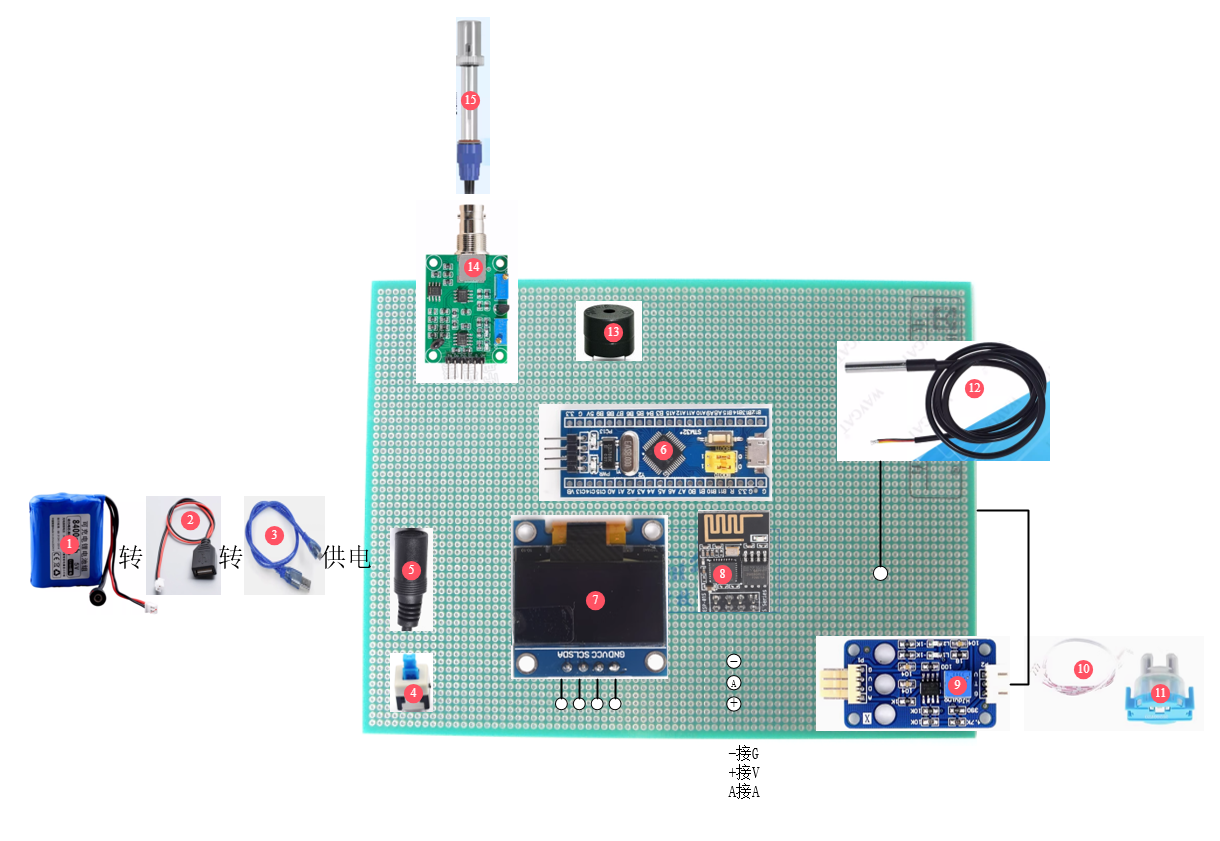
三、物联网模块组装
ESP8266主控组装
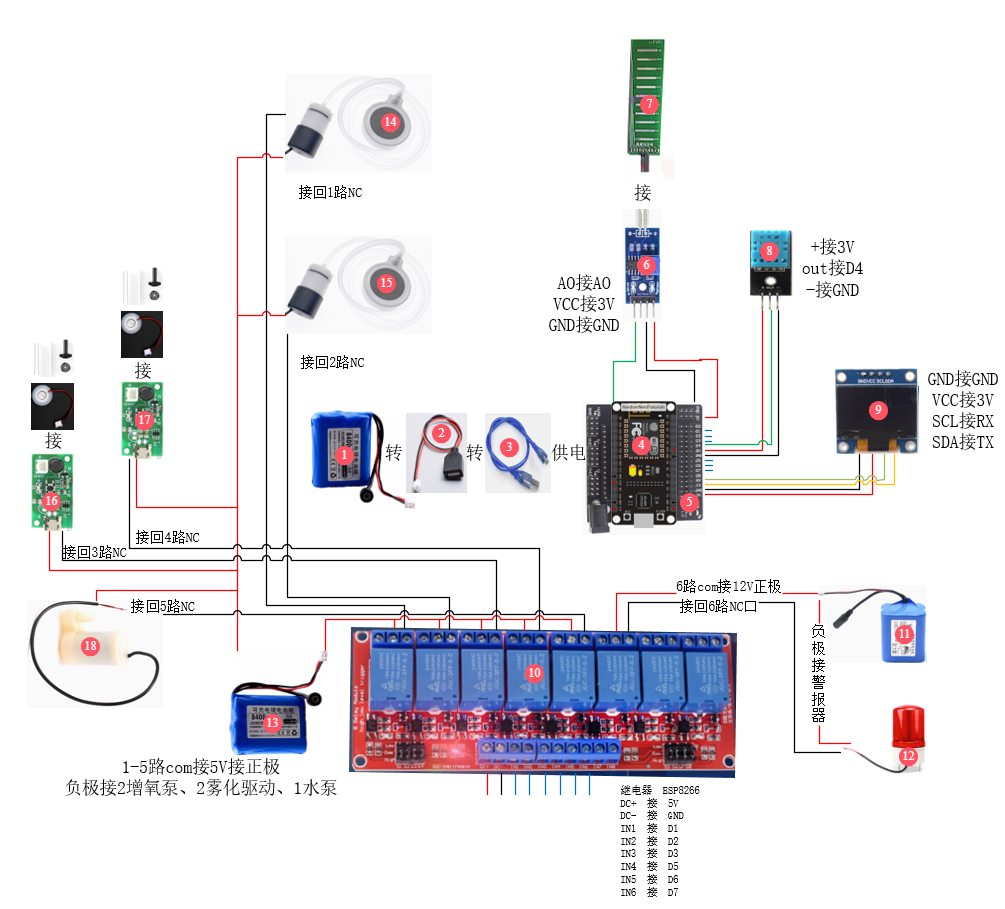
| 序号 | 模块 | 序号 | 模块 | 序号 | 模块 |
|---|---|---|---|---|---|
| 1 | 5V锂电池 | 2 | XH2.54转USB | 3 | micro USB数据线 |
| 4 | ESP8266主控 | 5 | ESP8266扩展板 | 6 | 数模转换器 |
| 7 | 水位探头 | 8 | 环境温湿度传感器 | 9 | 0.96寸OLED显示屏 |
| 10 | 8路继电器 | 11 | 12V锂电池 | 12 | 报警器 |
| 13 | 5V锂电池 | 14 | 增氧泵1 | 15 | 增氧泵2 |
| 16 | 雾化驱动1 | 17 | 雾化驱动2 | 18 | 水泵 |
STM32水质检测组装
| 序号 | 模块 | 序号 | 模块 | 序号 | 模块 |
|---|---|---|---|---|---|
| 1 | 5V锂电池 | 2 | XH2.54转USB | 3 | DC3.5mm电源线 |
| 4 | 开关按键 | 5 | DC3.5mm母座 | 6 | STM32单片机 |
| 7 | 0.96寸OLED显示屏 | 8 | ESP-01Swifi模块 | 9 | 数模转换器 |
| 10 | XH2.54端子线 | 11 | 浊度传感器 | 12 | DS18B20温度传感 |
| 13 | 蜂鸣器 | 14 | PH监测模块 | 15 | PH电极探头 |
系统总装
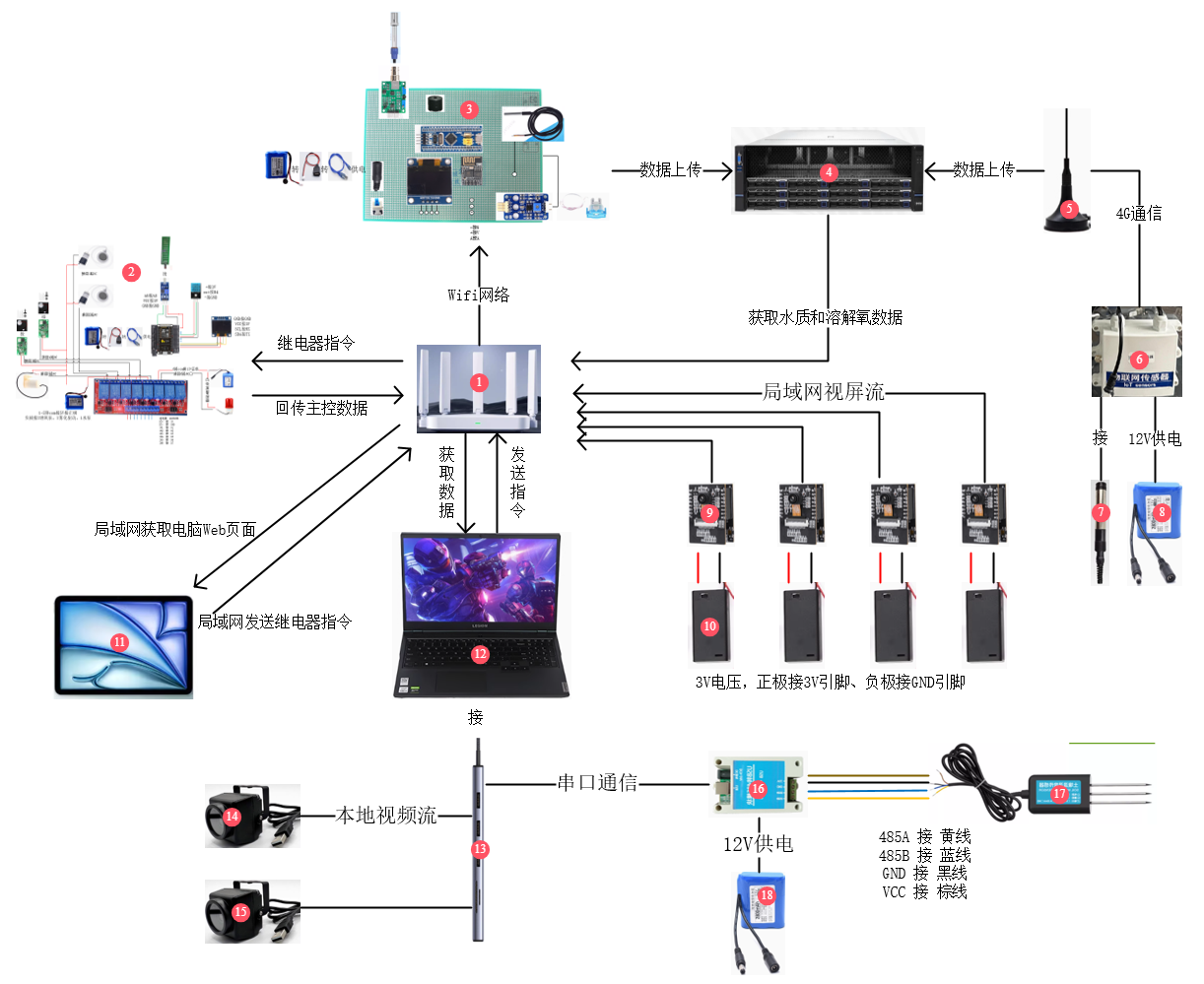
| 序号 | 模块 | 序号 | 模块 | 序号 | 模块 |
|---|---|---|---|---|---|
| 1 | 无线网络/局域网 | 2 | ESP8266主控组 | 3 | STM32水质检测组 |
| 4 | 服务器 | 5 | 4G模块 | 6 | 溶解氧传感器 |
| 7 | 溶解氧探头 | 8 | 12V锂电池 | 9 | ESP32-CAM开发板 |
| 10 | 3V电池盒 | 11 | 平板电脑 | 12 | 电脑 |
| 13 | 拓展坞 | 14 | USB摄像头1 | 15 | USB摄像头2 |
| 16 | USB转485模块 | 17 | 土壤传感器 | 18 | 12V锂电池 |
四、接口开发
环境搭建
1、开发工具
Python 3.12
PyCharm 2021.3.1
2、项目结构

接口开发
1、项目依赖 | requirements.txt
flask~=3.0.0
minimalmodbus~=2.1.1
pyserial~=3.5
requests~=2.31.0
paho-mqtt~=2.1.0
blynklib~=0.2.6
opencv-python~=4.8.1.78
comtypes~=1.4.11
pygrabber~=0.2
PyYAML~=6.0.1
安装依赖命令
pip install -r requirements.txt
2、配置文件 | config.yaml
# 程序启动端口
API:
host: "0.0.0.0"
port: 5000
# 土壤传感器配置 port通过“电脑”>“管理”>“设备管理”>“端口”
SOIL:
port: "COM5"
baudRate: 9600
timeout: 1.0
slaveAddress: 1
# 水质传感器 token获取登录“https://www.wztdzmcu.com”;账号密码:“8252******680”
WATER:
device_id: "8252******680"
token: "5a0ee803******************24fd313"
# 溶解氧传感器
OXY:
base_url: "http://123.*.*.104:9922"
serial_no: "A20******RJ"
device_no: "862************0611"
collection_time: "2025-06-12"
# ESP8266主板 联网后通过网络设备查
ESP8266:
host: "192.168.43.212"
# 摄像头设备列表 联网后通过网络设备查
cameras:
- id: 1
name: "北区稻田"
ip: "192.168.43.120"
- id: 2
name: "南区稻田"
ip: "192.168.43.154"
- id: 3
name: "吊笼检测"
ip: "192.168.43.237"
- id: 4
name: "巡航船"
ip: "192.168.43.85"
3、主程序 | main.py
from flask import Flask, jsonify, request
from data.envData import get_envData
from data.execute import DeviceController
from data.soilData import read_sensor_data
from data.videoData import get_video_urls, list_cameras, handle_stream
from data.waterData import get_device_info, get_history_data, get_real_time_data, query_device_data
from flask_cors import CORS
from utils.configUtils import config
# 本地API配置
host = config['API']['host']
port = config['API']['port']
app = Flask(__name__)
CORS(app) # 允许所有来源访问所有路由
# === 土壤数据接口 ===
@app.route('/api/soilData', methods=['GET'])
def get_sensor_data():
return jsonify(read_sensor_data())
# === 水质溶解氧设备基本信息 ===
@app.route('/api/waterOxyInfo', methods=['GET'])
def proxy_device_data():
return jsonify(get_device_info())
# === 水质溶解氧历史数据(可配置时间) ===
@app.route('/api/waterOxyHistory', methods=['GET'])
def proxy_history_data():
return jsonify(get_history_data())
# === 水质溶解氧实时数据 ===
@app.route('/api/waterOxyNow', methods=['GET'])
def proxy_real_time_data():
return jsonify(get_real_time_data())
# === 水质数据 ===
@app.route('/api/waterData', methods=['GET'])
def get_iot_device_data():
return jsonify(query_device_data())
# === 环境数据 ===
@app.route('/api/envData', methods=['GET'])
def env_data():
return jsonify(get_envData())
# === esp32视频 ===
@app.route('/api/videoUrl', methods=['GET'])
def get_video_stream_url():
return jsonify(get_video_urls())
# 获取视屏流列表
@app.route('/api/cameraList')
def camera_list():
return jsonify(list_cameras())
# 通过索引查看视频流
@app.route('/api/stream')
def stream():
index = request.args.get('index', default='0') # 默认是字符串 '0'
return handle_stream(index)
# ESP8266指令请求
@app.route('/api/execute', methods=['GET'])
def execute():
pin = request.args.get('pin')
state = request.args.get('state')
return jsonify(DeviceController().control_by_pin(pin, state))
if __name__ == '__main__':
app.run(host=host, port=port)
4、摄像头管理器 | CameraManager.py
# 工具类-全局摄像头管理器
import cv2
import threading
from typing import Dict
from collections import defaultdict
class CameraManager:
_instance = None
_lock = threading.Lock()
_cameras: Dict[int, cv2.VideoCapture] = {}
_ref_counts: Dict[int, int] = defaultdict(int)
def __new__(cls):
if cls._instance is None:
with cls._lock:
if cls._instance is None:
cls._instance = super().__new__(cls)
return cls._instance
def get_camera(self, camera_index: int) -> cv2.VideoCapture:
with self._lock:
if camera_index not in self._cameras:
cap = cv2.VideoCapture(camera_index)
if not cap.isOpened():
raise RuntimeError(f"无法打开摄像头 {camera_index}")
self._cameras[camera_index] = cap
self._ref_counts[camera_index] += 1
return self._cameras[camera_index]
def release(self, camera_index: int): # 修改了方法名
with self._lock:
if camera_index in self._ref_counts:
self._ref_counts[camera_index] -= 1
if self._ref_counts[camera_index] <= 0:
if camera_index in self._cameras:
self._cameras[camera_index].release()
del self._cameras[camera_index]
del self._ref_counts[camera_index]
5、全局配置获取 | configUtils.py
# 工具类-全局配置获取
from pathlib import Path
import yaml
def load_yaml_config():
config_path = Path(__file__).parent.parent / "config.yaml"
print("配置文件绝对路径:", config_path.resolve())
if not config_path.exists():
raise FileNotFoundError(f"配置文件不存在于:{config_path}")
with open(config_path, 'r', encoding='utf-8') as f:
return yaml.safe_load(f)
# 全局配置对象
config = load_yaml_config()
6、封装返回结果 | respUtils.py
# 工具类-封装返回结果
from typing import Any, Dict, Optional
from datetime import datetime
def res(
success: bool,
data: Any = None,
message: Optional[str] = None,
custom_code: Optional[int] = None
) -> Dict[str, Any]:
"""
统一API响应格式
:param success: 请求是否成功
:param data: 返回的数据,默认为None
:param message: 自定义错误信息,默认为None(失败时默认使用"请求失败")
:param custom_code: 自定义状态码,默认为None(成功200,失败400)
:return: 包含code、message、data和timestamp的字典
"""
if success:
response = {
"code": 200,
"message": "请求成功",
"data": data,
"timestamp": datetime.now().strftime("%Y-%m-%d %H:%M:%S")
}
else:
response = {
"code": custom_code if custom_code is not None else 400,
"message": message if message is not None else "请求失败",
"data": None,
"timestamp": datetime.now().strftime("%Y-%m-%d %H:%M:%S")
}
# 如果提供了自定义状态码,则覆盖默认值
if custom_code is not None:
response["code"] = custom_code
return response
7、环境数据 | envData.py
# 环境
import requests
from datetime import datetime, timedelta
from utils.configUtils import config
from utils.respUtils import res
class ESP8266SensorReader:
def __init__(self, ip=None, timeout=2):
self.base_url = f"http://{ip or config['ESP8266']['host'].strip()}"
self.timeout = timeout
self.cache = {
'temperature': {'value': None, 'status': 0, 'timestamp': None},
'humidity': {'value': None, 'status': 0, 'timestamp': None},
'water_level': {'value': None, 'status': 0, 'timestamp': None},
'water_percent': {'value': None, 'status': 0, 'timestamp': None}
}
# 水位传感器校准值(根据实际测量调整)
self.water_calibration = {
'dry': 200, # 空水位ADC值
'wet': 800, # 满水位ADC值
'min_percent': 0,
'max_percent': 100
}
def _fetch_sensor_data(self):
"""从ESP8266获取传感器数据"""
try:
response = requests.get(
f"{self.base_url}/sensors",
timeout=self.timeout
)
if response.status_code == 200:
data = response.json()
return {
'status': {
'dht': data.get('status', {}).get('dht', 0) == 1,
'soil': data.get('status', {}).get('soil', 0) == 1
},
'data': data.get('data', {})
}
return None
except Exception as e:
print(f"传感器请求异常: {str(e)}")
return None
def _calibrate_water(self, raw_value):
"""水位传感器校准"""
if raw_value is None:
return None
dry = self.water_calibration['dry']
wet = self.water_calibration['wet']
min_p = self.water_calibration['min_percent']
max_p = self.water_calibration['max_percent']
# 计算百分比并限制在范围内
percent = (raw_value - dry) / (wet - dry) * 100
percent = max(min_p, min(max_p, percent))
return int(percent)
def get_cached_data(self, max_age_seconds=30):
"""获取带缓存的传感器数据"""
now = datetime.now()
need_refresh = False
# 检查是否需要刷新缓存
for key in self.cache:
if (self.cache[key]['timestamp'] is None or
(now - self.cache[key]['timestamp']) > timedelta(seconds=max_age_seconds)):
need_refresh = True
break
if need_refresh:
fresh_data = self._fetch_sensor_data()
if fresh_data:
timestamp = now
dht_status = fresh_data['status']['dht']
soil_status = fresh_data['status']['soil']
# 更新温度
temp = fresh_data['data'].get('temperature')
self.cache['temperature'] = {
'value': float(temp) if dht_status and temp is not None else None,
'status': 1 if dht_status and temp is not None else 0,
'timestamp': timestamp
}
# 更新湿度
humi = fresh_data['data'].get('humidity')
self.cache['humidity'] = {
'value': float(humi) if dht_status and humi is not None else None,
'status': 1 if dht_status and humi is not None else 0,
'timestamp': timestamp
}
# 更新水位原始值
water_level = fresh_data['data'].get('water_level')
self.cache['water_level'] = {
'value': int(water_level) if soil_status and water_level is not None else None,
'status': 1 if soil_status and water_level is not None else 0,
'timestamp': timestamp
}
# 更新水位百分比
water_percent = None
if soil_status and water_level is not None:
water_percent = self._calibrate_water(water_level)
self.cache['water_percent'] = {
'value': water_percent,
'status': 1 if water_percent is not None else 0,
'timestamp': timestamp
}
return {
'temperature': self.cache['temperature'],
'humidity': self.cache['humidity'],
'water_level': self.cache['water_level'],
'water_percent': self.cache['water_percent']
}
def get_envData():
sensor_reader = ESP8266SensorReader()
sensor_data = sensor_reader.get_cached_data()
return res(
success=True,
data={
"speed": {
"status": 1,
"value": "3.2-5.7m/s"
},
"direction": {
"status": 1,
"value": "西北",
},
"light": {
"status": 1,
"value": 450
},
"temp": {
"status": sensor_data['temperature']['status'],
"value": sensor_data['temperature']['value'] if sensor_data['temperature']['status'] else None
},
"humidity": {
"status": sensor_data['humidity']['status'],
"value": sensor_data['humidity']['value'] if sensor_data['humidity']['status'] else None
},
"water": {
"status": sensor_data['water_level']['status'],
"deep": sensor_data['water_level']['value'] if sensor_data['water_level']['status'] else None,
"value": sensor_data['water_percent']['value'] if sensor_data['water_percent']['status'] else None
}
},
message="请求成功"
)
8、土壤数据 | soilData.py
# 土壤传感器
import minimalmodbus
import serial
from typing import Dict, Any
from utils.configUtils import config
from utils.respUtils import res
# 读取配置
port = config['SOIL']['port'].strip()
baudRate = config['SOIL']['baudRate']
timeout = config['SOIL']['timeout']
slaveAddress = config['SOIL']['slaveAddress']
REGISTER_MAP = {
'temperature': 48,
'humidity': 49,
'conductivity': 50,
'ph': 52,
'nitrogen': 53,
'phosphorus': 54,
'potassium': 55
}
def read_sensor_data() -> Dict[str, Any]:
"""
读取传感器数据
:return: 统一格式的响应字典
"""
try:
instrument = minimalmodbus.Instrument(port=port, slaveaddress=slaveAddress)
instrument.serial.baudrate = baudRate
instrument.serial.timeout = timeout
if not instrument.serial.is_open:
instrument.serial.open()
sensor_data = {
'temperature': instrument.read_register(REGISTER_MAP['temperature'], number_of_decimals=1),
'humidity': instrument.read_register(REGISTER_MAP['humidity'], number_of_decimals=1),
'conductivity': instrument.read_register(REGISTER_MAP['conductivity']),
'ph': instrument.read_register(REGISTER_MAP['ph'], number_of_decimals=1),
'nitrogen': instrument.read_register(REGISTER_MAP['nitrogen']),
'phosphorus': instrument.read_register(REGISTER_MAP['phosphorus']),
'potassium': instrument.read_register(REGISTER_MAP['potassium'])
}
instrument.serial.close()
return res(
success=True,
data={
'status': 1, # 连接正常
'sensor_data': sensor_data # 传感器数据
},
message="数据读取成功"
)
except (serial.SerialException, FileNotFoundError):
# 串口异常返回:空数据 + status=0
return res(
success=True,
data={
'status': 0, # 连接异常
'sensor_data': {} # 空数据
},
message="设备离线,请检查土壤传感器连接",
)
except Exception as e:
# 其他异常返回:空数据 + status=0
return res(
success=False,
data={
'status': 0, # 连接异常
'sensor_data': {} # 空数据
},
message=f"读取数据时发生错误: {str(e)}",
custom_code=500
)
9、视屏流数据 | videoData.py
# 视频流
from flask import Response
from utils.CameraManager import CameraManager
from utils.configUtils import config
from utils.respUtils import res
from pygrabber.dshow_graph import FilterGraph
import comtypes
from typing import Any, Dict, Generator
import cv2
# esp32-cam视频画面
def get_video_urls():
return res(
success=True,
data=config['cameras'],
message="视频流地址获取成功"
)
# 本地摄像头列表
def list_cameras() -> Dict[str, Any]:
"""
获取摄像头列表,封装为统一响应格式
"""
try:
comtypes.CoInitialize()
graph = FilterGraph()
devices = graph.get_input_devices()
comtypes.CoUninitialize()
return res(
success=True,
data=[
{"index": idx, "label": name}
for idx, name in enumerate(devices)
],
message="摄像头列表获取成功"
)
except Exception as e:
return res(
success=False,
message=f"获取摄像头失败: {str(e)}",
custom_code=500
)
# 初始化全局摄像头管理器
camera_manager = CameraManager()
def gen_frames(camera_index: int) -> Generator[bytes, None, None]:
cap = None
try:
cap = camera_manager.get_camera(camera_index)
while True:
success, frame = cap.read()
if not success:
break
ret, buffer = cv2.imencode('.jpg', frame)
if not ret:
continue
frame_bytes = buffer.tobytes()
yield (b'--frame\r\n'
b'Content-Type: image/jpeg\r\n\r\n' + frame_bytes + b'\r\n')
finally:
if cap is not None:
camera_manager.release(camera_index) # 使用正确的方法名
def handle_stream(index: str):
try:
camera_index = int(index)
return Response(
gen_frames(camera_index),
mimetype='multipart/x-mixed-replace; boundary=frame'
)
except Exception as e:
from flask import jsonify
return jsonify({
"success": False,
"message": f"视频流启动失败: {str(e)}",
"code": 500
})
10、水质数据 | waterData.py
# 水质检测
import requests
from utils.configUtils import config
from utils.respUtils import res
import time
import datetime
# === 读取配置 ===
# WATER配置
DEVICE_ID = config['WATER']['device_id'].strip()
DEVICE_TOKEN = config['WATER']['token'].strip()
# OXY配置
BASE_URL = config['OXY']['base_url'].strip()
DEFAULT_SERIAL_NO = config['OXY']['serial_no'].strip()
DEFAULT_DEVICE_NO = config['OXY']['device_no'].strip()
# 溶解氧传感器信息
def get_device_info():
try:
response = requests.get(
f"{BASE_URL}/deviceData",
params={'serialNo': DEFAULT_SERIAL_NO},
timeout=5
)
response.raise_for_status()
return res(success=True, data=response.json(), message="设备信息获取成功")
except requests.exceptions.RequestException as e:
return res(success=False, message=f"设备信息获取失败: {str(e)}", custom_code=500)
# 溶解氧传感器采集的历史信息
def get_history_data():
try:
response = requests.get(
f"{BASE_URL}/historyData",
params={
'serialNo': DEFAULT_SERIAL_NO,
'deviceNo': DEFAULT_DEVICE_NO
},
timeout=5
)
response.raise_for_status()
# 获取所有数据,并取最后 20 条
all_data = response.json()
last_20_data = all_data[-20:] if isinstance(all_data, list) else []
return res(success=True, data=last_20_data, message="历史数据获取成功")
except requests.exceptions.RequestException as e:
return res(success=False, message=f"历史数据获取失败: {str(e)}", custom_code=500)
# 溶解氧传感器采集的当前信息
def get_real_time_data():
try:
response = requests.get(
f"{BASE_URL}/realTimeData",
params={
'serialNo': DEFAULT_SERIAL_NO,
'deviceNo': DEFAULT_DEVICE_NO
},
timeout=5
)
response.raise_for_status()
return res(success=True, data=response.json(), message="实时数据获取成功")
except requests.exceptions.RequestException as e:
return res(success=False, message=f"实时数据获取失败: {str(e)}", custom_code=500)
# stem32传感器PH、温度、浊度
def query_device_data() -> dict:
url = "https://www.wztdzmcu.com/renren-admin/api/device/queryAllByProductIdAndDeviceId"
params = {
"deviceId": DEVICE_ID,
"_t": int(time.time() * 1000)
}
headers = {
"User-Agent": "Mozilla/5.0 (Windows NT 10.0; Win64; x64) AppleWebKit/537.36 (KHTML, like Gecko) Chrome/137.0.0.0 Safari/537.36",
"Referer": "https://www.wztdzmcu.com/",
"Origin": "https://www.wztdzmcu.com",
"token": DEVICE_TOKEN
}
try:
response = requests.get(url, headers=headers, params=params, timeout=10)
response.raise_for_status()
response_data = response.json()
status = 0 # 默认状态
if response_data.get('code') == 0 and 'data' in response_data:
# 设备状态检查
last_item = response_data['data'][-1]
if 'createTime' in last_item:
try:
current_timestamp = int(time.time() * 1000) # 当前时间戳(毫秒)
last_timestamp = int(last_item['createTime']) # 数据时间戳
if current_timestamp - last_timestamp < 5000: # 如果数据时间比当前时间晚5秒以内(5000毫秒)
status = 1
except (ValueError, TypeError):
pass # 时间戳转换失败保持status=0
# 设备状态检查
for item in response_data['data']:
if 'createTime' in item:
item['createTime'] = datetime.datetime.fromtimestamp(int(item['createTime']) / 1000).strftime(
"%Y-%m-%d %H:%M:%S")
# 构建标准响应
modelData = {
'status': status, # 0=离线/滞后,1=在线
'list': response_data['data'] # 设备数据列表
}
return res(success=True, data=modelData, message="设备数据获取成功")
except requests.exceptions.RequestException as e:
return res(success=False, message=f"设备数据获取失败: {str(e)}", custom_code=500)
11、发送指令 | execute.py
import requests
from typing import Any, Dict
from utils.configUtils import config
from utils.respUtils import res
class DeviceController:
def __init__(self):
# 直接使用全局配置
self.base_url = f"http://{config['ESP8266']['host'].strip()}/control"
def control_by_pin(self, pin: str, state: str) -> Dict[str, Any]:
# 参数验证
if not pin or not state:
return res(
success=False,
custom_code=400,
message="参数pin和state不能为空"
)
# 状态参数转换
try:
state_bool = self._parse_state(state)
except ValueError as e:
return res(
success=False,
custom_code=400,
message=str(e)
)
# 发送控制请求
try:
params = {"pin": pin, "state": 1 if state_bool else 0}
response = requests.get(self.base_url, params=params, timeout=5)
response.raise_for_status()
device_resp = response.json()
# 验证设备响应(但不返回给前端)
if not self._validate_device_response(device_resp, pin, state_bool):
return res(
success=False,
custom_code=502,
message="设备返回无效响应"
)
# 优化后的返回数据,只包含pin和state
return res(
success=True,
data={
"pin": pin,
"state": 0 if state_bool is False else 1 # 直接返回设备状态值
},
message=f"引脚 {pin} 控制成功"
)
except requests.exceptions.RequestException as e:
return res(
success=False,
custom_code=503,
message=f"设备通信失败: {str(e)}"
)
except ValueError as e:
return res(
success=False,
custom_code=500,
message=f"响应解析失败: {str(e)}"
)
def _parse_state(self, state: str) -> bool:
"""解析状态字符串"""
state = str(state).lower().strip()
if state in ('1', 'true', 'on'):
return True
elif state in ('0', 'false', 'off'):
return False
raise ValueError(f"无效的state参数: {state} (请使用1/0, true/false或on/off)")
def _validate_device_response(self, response: Dict, pin: str, target_state: bool) -> bool:
"""验证设备返回的响应是否有效(内部使用)"""
return (
isinstance(response, dict) and
str(response.get("pin")) == pin and
int(response.get("state", -1)) == (1 if target_state else 0)
)
程序运行
通过备注的信息,完善配置信息
# 土壤传感器配置 port通过“电脑”>“管理”>“设备管理”>“端口”
SOIL:
port: "COM5"
# 水质传感器 token获取登录“https://www.wztdzmcu.com”;账号密码:“8252560513680”
WATER:
token: "5a0ee803df301693dde1d305d24fd313"
# ESP8266主板 联网后通过网络设备查
ESP8266:
host: "192.168.43.212"
# 摄像头设备列表 联网后通过网络设备查
cameras:
- id: 1
name: "北区稻田"
ip: "192.168.43.120"
- id: 2
name: "南区稻田"
ip: "192.168.43.154"
- id: 3
name: "吊笼检测"
ip: "192.168.43.237"
- id: 4
name: "巡航船"
ip: "192.168.43.85"
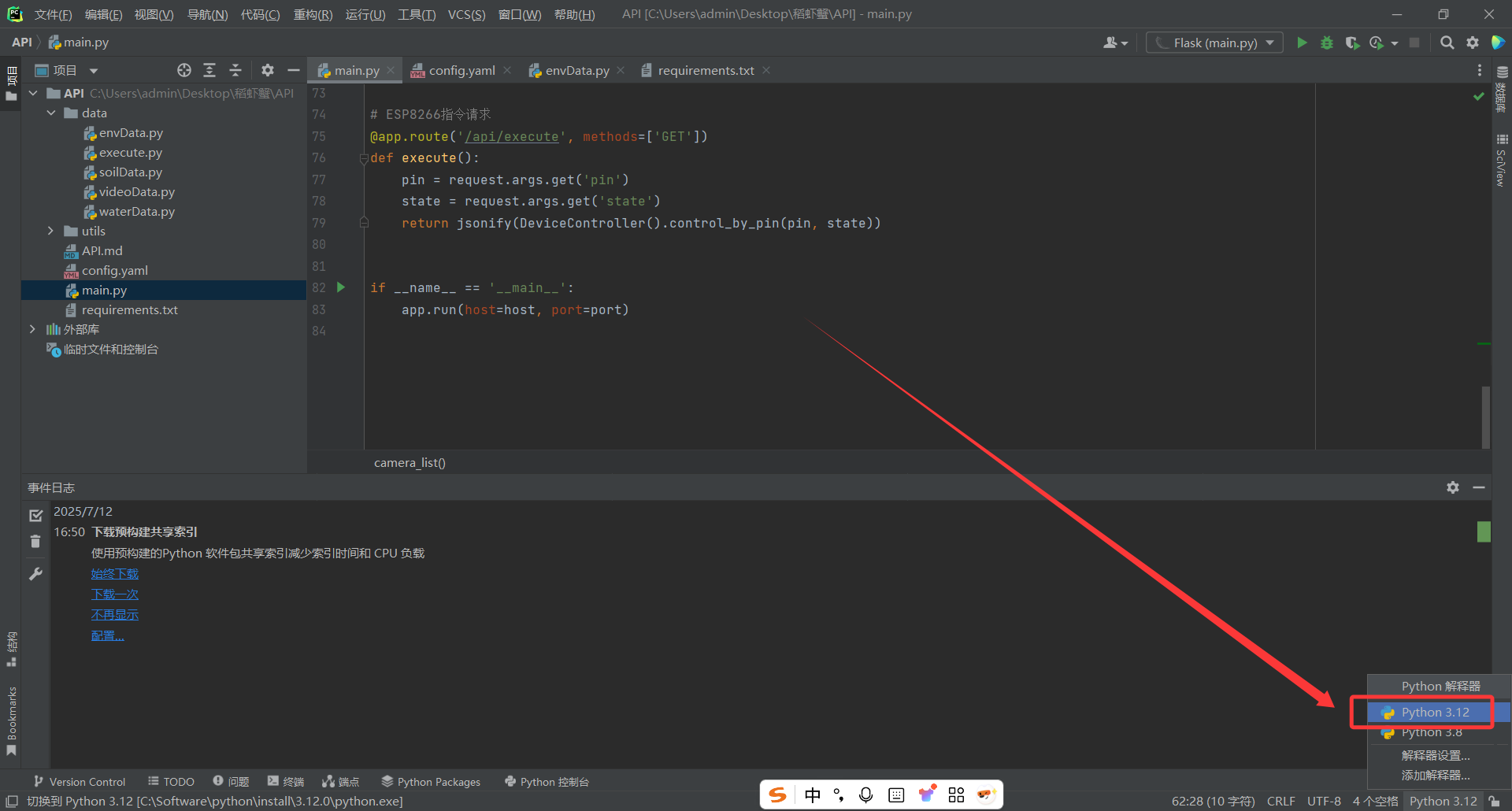
选择Python解释器
右键main.py,选择”运行“
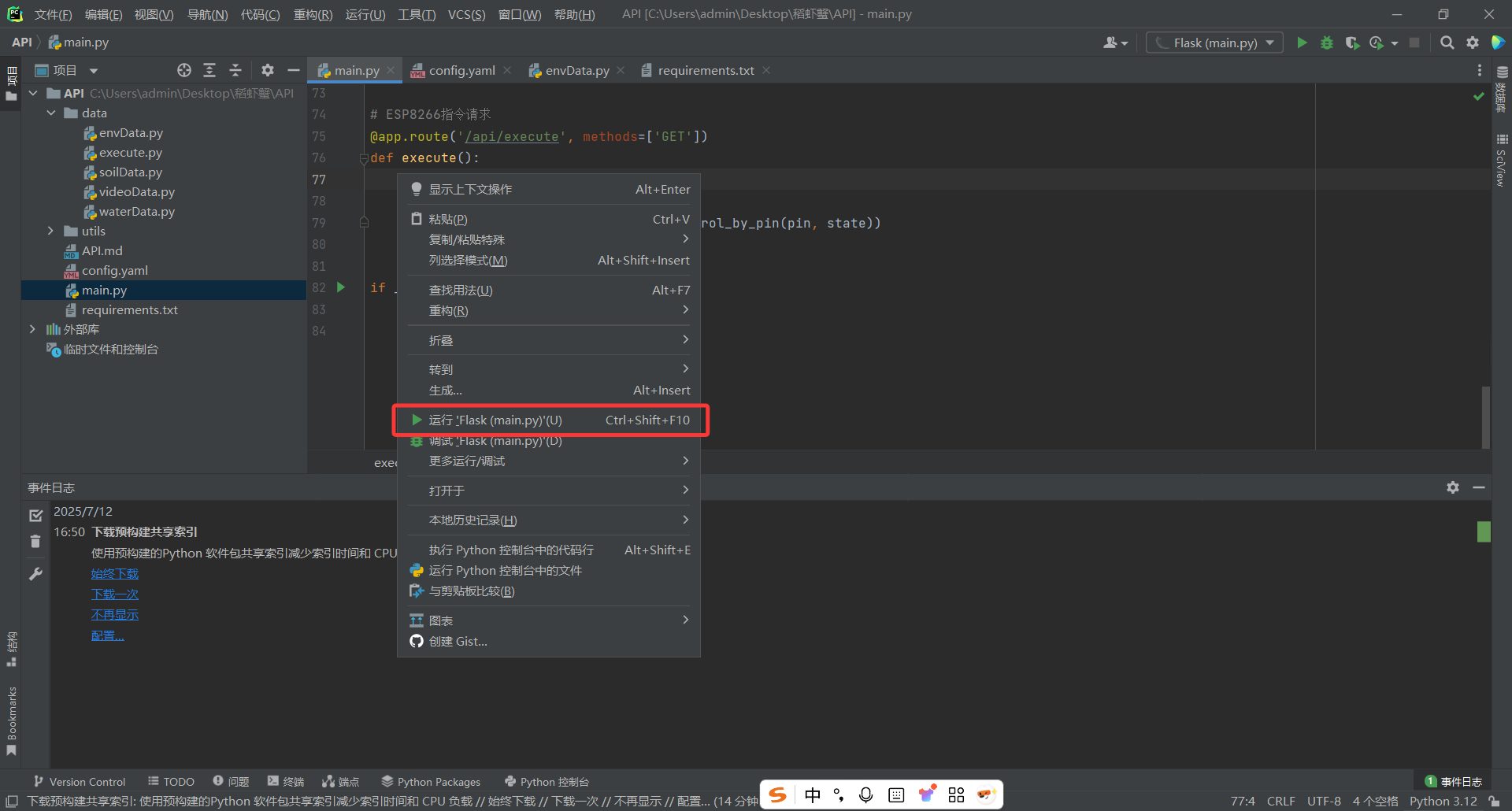
启动成功
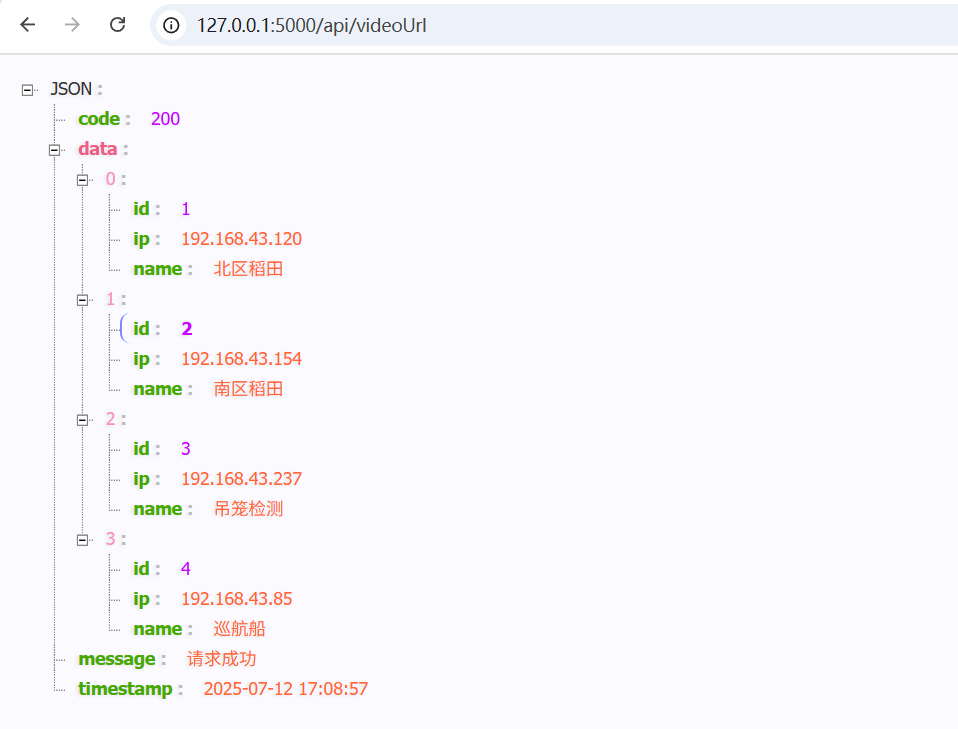
打开浏览器输入:http://127.0.0.1:5000 +接口地址
例如:
接口文档
1、土壤数据
GET /api/soilData
{
"code": 200,
"data": {
"sensor_data": {
"conductivity": 0, # 电导率
"humidity": 0, # 湿度
"nitrogen": 0, # 氮
"ph": 70, # PH值
"phosphorus": 0, # 磷
"potassium": 0, # 钾
"temperature": 26.6 # 温度
},
"status": 1
},
"message": "请求成功",
"timestamp": "2025-06-13 17:41:50"
}
2、溶解氧设备信息
GET /api/waterOxyInfo
{
"code": 200,
"data": [
{
"address": "安徽省芜湖市弋江区香樟东路", # 设备位置
"createTime": "2025-06-06 22:02:10",
"deviceNo": "862538064340611", # 设备编码
"id": 37,
"isDeleted": 0,
"latitude": 31.285111,
"longitude": 118.376905,
"name": "水质溶解氧传感器", # 设备名称
"status": 1, # 溶解氧传感器设备状态
"templateId": 6,
"updateTime": "2025-06-10 13:34:54",
"userId": 11
}
],
"message": "请求成功",
"timestamp": "2025-06-13 17:52:48"
}
3、溶解氧历史数据
GET /api/waterOxyHistory
{
"code": 200,
"data": [
......
{
"address": "安徽省芜湖市弋江区香樟东路", # 设备位置
"createTime": "2025-06-13 17:46:34", # 数据创建时间
"deviceNo": "862538064340611", # 设备编码
"isAlarm": 1, # 是否报警
"name": "水质溶解氧传感器", # 设备名称
"unit": "水质溶解氧mg/L", # 数据单位
"value": "0.12" # 值
},
{
"address": "安徽省芜湖市弋江区香樟东路",
"createTime": "2025-06-13 17:47:34",
"deviceNo": "862538064340611",
"isAlarm": 1,
"name": "水质溶解氧传感器",
"unit": "水质溶解氧mg/L",
"value": "0.12"
}
],
"message": "请求成功",
"timestamp": "2025-06-13 17:47:54"
}
4、溶解氧实时数据
GET /api/waterOxyNow
{
"code": 200,
"data": {
"appId": "",
"createTime": "2025-06-13 17:56:37",
"data": [
{
"deviceType": "水质溶解氧", # 参数名称
"value": "0.12" # 查询值
}
],
"deviceNo": "862538064340611" # 设备编码
},
"message": "请求成功",
"timestamp": "2025-06-13 17:56:38"
}
5、水质数据
GET /api/waterData
{
"code": 200,
"data": {
"list": [
......
{
"createTime": "2025-06-13 18:00:43",
"dataMap": {
"ph": 5.05, # 水PH值
"temp": 25, # 水温度
"tur": 0 # 水浊度
},
"deviceId": "8252560513680", # 设备编号
"productId": null
},
{
"createTime": "2025-06-13 18:00:46",
"dataMap": {
"ph": 5.04,
"temp": 25,
"tur": 0
},
"deviceId": "8252560513680",
"productId": null
}
],
"status": 1 # 设备状态
},
"message": "请求成功",
"timestamp": "2025-06-13 18:00:47"
}
6、环境数据
GET /api/envData
{
"code": 200,
"data": {
"direction": { # 风向
"status": 1,
"value": "西北"
},
"humidity": { # 环境湿度
"status": 1,
"value": 37
},
"light": { # 光照强度
"status": 1,
"value": 450
},
"speed": { # 风速
"status": 1,
"value": "3.2-5.7m/s"
},
"temp": { # 环境温度
"status": 1,
"value": 29
},
"water": { # 水深
"status": 1,
"value": 0, # 百分比
"deep": 7 # 传感器值
}
},
"message": "请求成功",
"timestamp": "2025-06-13 19:02:48"
}
7、ESP32-CAM地址
GET /api/videoUrl
{
"code": 200,
"data": [
{
"id": 1,
"ip": "192.168.137.252",
"name": "北区稻田"
},
{
"id": 2,
"ip": "192.168.137.95",
"name": "南区稻田"
},
{
"id": 3,
"ip": "192.168.137.229",
"name": "蟹池"
},
{
"id": 4,
"ip": "192.168.137.14",
"name": "巡航船"
}
],
"message": "请求成功",
"timestamp": "2025-06-27 16:16:16"
}
注:视频流 http://$:81/stream
8、本地摄像头视频流
获取视频索引列表
GET /api/cameraList
{
"code": 200,
"data": [
{
"index": 0,
"label": "Integrated Camera"
},
{
"index": 1,
"label": "Integrated Video"
}
],
"message": "请求成功",
"timestamp": "2025-06-27 16:22:49"
}
通过索引查看视频
GET /api/stream
| 参数名 | 类型 | 示例值 | 说明 |
|---|---|---|---|
| index | int | 0 | 接口/api/cameraList中data索引为0的视频流 |
9、指令接口
GET /api/execute
| 参数名 | 类型 | 示例值 | 说明 |
|---|---|---|---|
| pin | string | V3 | 控制器对应的信号引脚 |
| state | int | 1 | 状态1:开启;0:关闭 |
有效值
| pin | state | 说明(暂定) |
|---|---|---|
| V3 | 1 | 东区-增氧-打开 |
| V3 | 0 | 东区-增氧-关闭 |
| V4 | 1 | 西区-增氧-打开 |
| V4 | 0 | 西区-增氧-关闭 |
| V5 | 1 | 东区-除虫-打开 |
| V5 | 0 | 东区-除虫-关闭 |
| V6 | 1 | 西区-除虫-打开 |
| V6 | 0 | 西区-除虫-关闭 |
| V7 | 1 | 东区-抽水-打开 |
| V7 | 0 | 东区-抽水-关闭 |
| V8 | 1 | 西区-抽水-打开 |
| V8 | 0 | 西区-抽水-关闭 |
五、Web开发
环境搭建
1、开发工具
- VSCode
- html+js+css
- IDEA插件- Live Server
2、项目结构
网页开发
1、HTML | index.html
<!DOCTYPE html>
<html lang="zh-CN">
<head>
<meta charset="UTF-8">
<meta name="viewport" content="width=device-width, initial-scale=1, maximum-scale=1, user-scalable=no">
<title>智能农业监控系统</title>
<link rel="stylesheet" href="https://cdnjs.cloudflare.com/ajax/libs/font-awesome/6.4.0/css/all.min.css" />
<link rel="stylesheet" href="style.css">
</head>
<body>
<div class="container">
<header>
<h1><i class="fas fa-seedling"></i> 生态养殖中控平台</h1>
<p class="subtitle">监测农田环境、水质、土壤参数,科学管理稻虾蟹生态养殖。</p>
</header>
<div class="dashboard">
<!-- 参数面板 -->
<div class="parameters-panel">
<h2 class="panel-title"><i class="fas fa-leaf"></i> 环境参数监测</h2>
<div class="section">
<h3 class="section-title"><i class="fas fa-mountain"></i> 土壤监测</h3>
<div class="parameters-grid">
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">土壤电导率</div>
<div class="parameter-icon"><i class="fas fa-bolt"></i></div>
</div>
<div class="parameter-value">1.2 dS/m</div>
<div class="parameter-status">正常范围: 0.8~1.5 dS/m</div>
</div>
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">土壤温度</div>
<div class="parameter-icon"><i class="fas fa-thermometer-half"></i></div>
</div>
<div class="parameter-value">24.5°C</div>
<div class="parameter-status">适宜范围: 20~30°C</div>
</div>
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">土壤湿度</div>
<div class="parameter-icon"><i class="fas fa-tint"></i></div>
</div>
<div class="parameter-value">65%</div>
<div class="parameter-status">适宜范围: 60~75%</div>
</div>
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">氮含量</div>
<div class="parameter-icon"><i class="fas fa-flask"></i></div>
</div>
<div class="parameter-value">84.9mg/kg</div>
<div class="parameter-status">正常范围: 50~100mg/kg</div>
</div>
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">磷含量</div>
<div class="parameter-icon"><i class="fas fa-flask"></i></div>
</div>
<div class="parameter-value">18.6mg/kg</div>
<div class="parameter-status">正常范围: 15~30mg/kg</div>
</div>
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">钾含量</div>
<div class="parameter-icon"><i class="fas fa-flask"></i></div>
</div>
<div class="parameter-value">136.2mg/kg</div>
<div class="parameter-status">正常范围: 100~150mg/kg</div>
</div>
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">土壤PH值</div>
<div class="parameter-icon"><i class="fas fa-vial"></i></div>
</div>
<div class="parameter-value">6.7</div>
<div class="parameter-status">适宜范围: 6.0~7.0</div>
</div>
</div>
</div>
<div class="section">
<h3 class="section-title"><i class="fas fa-water"></i> 水质监测</h3>
<div class="parameters-grid">
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">水PH值</div>
<div class="parameter-icon"><i class="fas fa-vial"></i></div>
</div>
<div class="parameter-value">7.6</div>
<div class="parameter-status">适宜范围: 7.5~8.0</div>
</div>
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">水温</div>
<div class="parameter-icon"><i class="fas fa-thermometer-half"></i></div>
</div>
<div class="parameter-value">23.6°C</div>
<div class="parameter-status">适宜范围: 22~26°C</div>
</div>
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">浊度</div>
<div class="parameter-icon"><i class="fas fa-vial"></i></div>
</div>
<div class="parameter-value">48NTU</div>
<div class="parameter-status">正常范围: 30~50NTU</div>
</div>
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">溶解氧</div>
<div class="parameter-icon"><i class="fas fa-vial"></i></div>
</div>
<div class="parameter-value">5.64mg/L</div>
<div class="parameter-status">正常范围: 5.0~8.0mg/L</div>
</div>
</div>
</div>
<div class="section">
<h3 class="section-title"><i class="fas fa-wind"></i> 气象监测</h3>
<div class="parameters-grid">
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">风向</div>
<div class="parameter-icon"><i class="fas fa-compass"></i></div>
</div>
<div class="parameter-value">东南风</div>
<div class="parameter-status">方向范围:0~360°</div>
</div>
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">风速</div>
<div class="parameter-icon"><i class="fas fa-wind"></i></div>
</div>
<div class="parameter-value">2.3m/s</div>
<div class="parameter-status">适宜范围:1.0~3.0m/s</div>
</div>
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">空气温度</div>
<div class="parameter-icon"><i class="fas fa-thermometer-half"></i></div>
</div>
<div class="parameter-value">25.5°C</div>
<div class="parameter-status">适宜范围: 22~32°C</div>
</div>
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">空气湿度</div>
<div class="parameter-icon"><i class="fas fa-cloud-rain"></i></div>
</div>
<div class="parameter-value">78%</div>
<div class="parameter-status">适宜范围: 60~80%</div>
</div>
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">光照强度</div>
<div class="parameter-icon"><i class="fas fa-sun"></i></div>
</div>
<div class="parameter-value">23015Lux</div>
<div class="parameter-status">适宜范围:20000~40000Lux</div>
</div>
<div class="parameter-card">
<div class="parameter-header">
<div class="parameter-name">水深</div>
<div class="parameter-icon"><i class="fas fa-ruler-vertical"></i></div>
</div>
<div class="parameter-value">110cm</div>
<div class="parameter-status">正常范围: 50~120cm</div>
</div>
</div>
</div>
</div>
<!-- 控制面板 -->
<div class="control-panel">
<h2 class="panel-title"><i class="fas fa-sliders-h"></i> 设备控制</h2>
<!-- 水平排列的控制组 -->
<div class="controls-grid">
<div class="control-group">
<h3 class="control-title"><i class="fas fa-fan"></i> 增氧</h3>
<div class="control-buttons">
<button class="control-btn oxygen-btn" data-device="oxygen" data-machine="1">
<i class="fas fa-wind"></i>
<span>东区</span>
<span class="status">关闭</span>
</button>
<button class="control-btn oxygen-btn" data-device="oxygen" data-machine="2">
<i class="fas fa-wind"></i>
<span>西区</span>
<span class="status">关闭</span>
</button>
</div>
</div>
<div class="control-group">
<h3 class="control-title"><i class="fas fa-bug"></i> 除虫</h3>
<div class="control-buttons">
<button class="control-btn insect-btn" data-device="insect" data-machine="1">
<i class="fas fa-spider"></i>
<span>东区</span>
<span class="status">关闭</span>
</button>
<button class="control-btn insect-btn" data-device="insect" data-machine="2">
<i class="fas fa-spider"></i>
<span>西区</span>
<span class="status">关闭</span>
</button>
</div>
</div>
<div class="control-group">
<h3 class="control-title"><!-- <i class="fas fa-faucet"></i> --> 抽水/报警</h3>
<div class="control-buttons">
<button class="control-btn pump-btn" data-device="pump" data-machine="1">
<i class="fas fa-water"></i>
<span>东区</span>
<span class="status">关闭</span>
</button>
<button class="control-btn " data-device="pump" data-machine="2"
style="background-color: #C0392B;color: #e1f5fe;">
<i class="fas fa-water"></i>
<span>报警</span>
<span class="status">关闭</span>
</button>
</div>
</div>
</div>
<div class="camera-container">
<div class="camera-header">
<h3 class="camera-title"><i class="fas fa-video"></i> 农田监控</h3>
<div class="camera-actions">
<div class="select-wrapper">
<select id="cameraSelect" class="camera-select">
<option value="">选择区域</option>
</select>
</div>
<button class="camera-btn" id="fullscreenBtn"><i class="fas fa-expand"></i> 全屏显示</button>
<button class="camera-btn" id="monitorRoomBtn"><i class="fas fa-video"></i> 监控室</button>
</div>
</div>
<div class="camera-feed">
<div class="camera-placeholder">
<i class="fas fa-camera"></i>
<h3>摄像头连接</h3>
<p>实时监控农田情况</p>
</div>
<img id="camera-video" src="">
<!-- <video src="pangxie.mp4" style="width:450px;width: 100%;height: 100%;object-fit: cover;display: block;"></video> -->
<!-- <div class="timestamp">2023-07-28 14:35:22</div> -->
</div>
</div>
</div>
</div>
<div class="status-bar">
<div class="status-item">
<div class="status-indicator"></div>
<span>系统状态: 运行中</span>
</div>
<div class="status-item">
<div class="status-indicator"></div>
<span>网络连接: 正常</span>
</div>
<div class="status-item">
<div class="status-indicator"></div>
<span>数据更新: 实时</span>
</div>
<div class="status-item">
<!-- <div class="status-indicator offline"></div>
<span>传感器 : #7离线</span> -->
<div class="status-indicator"></div>
<span>传感器 : 在线</span>
</div>
</div>
</div>
<!-- 添加全屏监控模态框HTML -->
<div class="modal-overlay" id="videoModal">
<div class="modal-container">
<div class="modal-header">
<h3>农田监控 - 全屏视图</h3>
<button class="close-modal" id="closeModal">×</button>
</div>
<div class="modal-content">
<img id="modal-video" src="">
</div>
</div>
</div>
<!-- 添加监控室模态框 -->
<div class="modal-overlay" id="monitorRoomModal">
<div class="modal-container monitor-room">
<div class="modal-header">
<h3>稻田监控室</h3>
<button class="close-modal" id="closeMonitorModal">×</button>
</div>
<div class="modal-content">
<div class="monitor-grid">
<!-- 监控画面将通过JS动态加载 -->
</div>
</div>
</div>
</div>
<script src="config.js"></script>
<!-- 填入JavaScript -->
</body>
</html>
2、JavaScript | index.html
<script>
const baseURL = AppConfig.API_BASE_URL;
// 获取本地摄像头列表,填充下拉框
async function loadCameraList() {
try {
const response = await fetch(`${baseURL}/api/cameraList`);
const result = await response.json();
if (result.code === 200 && Array.isArray(result.data)) {
const select = document.getElementById('cameraSelect');
// 清空之前的选项,只保留第一个“请选择”选项
select.options.length = 1;
result.data.forEach(cam => {
const option = document.createElement('option');
option.value = cam.index; // index用作value,后端摄像头索引
option.textContent = cam.label;
select.appendChild(option);
});
} else {
console.error('获取摄像头列表失败', result.message);
}
} catch (e) {
console.error('请求摄像头列表出错', e);
}
}
function updateVideoStream(cameraIndex) {
const video = document.getElementById('camera-video');
const placeholder = document.querySelector('.camera-placeholder');
if (!cameraIndex) {
// 无选择时:清空视频源,显示提示
video.src = '';
video.style.display = 'none';
placeholder.style.display = 'flex'; // 或 block,视样式而定
return;
}
// 有选择时:更新视频源,隐藏提示
video.src = `${baseURL}/api/stream?index=${cameraIndex}&t=${Date.now()}`;
video.style.display = 'block';
placeholder.style.display = 'none';
}
// 监听选择事件
document.getElementById('cameraSelect').addEventListener('change', function () {
updateVideoStream(this.value);
});
// 页面加载时,加载摄像头列表
window.addEventListener('load', loadCameraList);
// 监控放大
document.getElementById('fullscreenBtn').addEventListener('click', function () {
const modal = document.getElementById('videoModal');
const videoElement = document.getElementById('camera-video');
const modalVideo = document.getElementById('modal-video');
modalVideo.src = videoElement.src; // 设置模态框视频源
modal.style.display = 'flex'; // 显示模态框
document.body.style.overflow = 'hidden'; // 禁用页面滚动
});
// 按钮关闭本地摄像头模态框
document.getElementById('closeModal').addEventListener('click', function () {
const modal = document.getElementById('videoModal');
modal.style.display = 'none';
document.body.style.overflow = 'auto';
});
// 监控室功能:ESP32-CAM摄像头
document.getElementById('monitorRoomBtn').addEventListener('click', async function () {
const modal = document.getElementById('monitorRoomModal');
const monitorGrid = document.querySelector('.monitor-grid');
monitorGrid.innerHTML = '';
try {
const res = await fetch(`${baseURL}/api/videoUrl`);
const json = await res.json();
if (json.code === 200 && Array.isArray(json.data)) {
json.data.forEach(camera => {
const { name, ip } = camera;
const monitorItem = document.createElement('div');
monitorItem.className = 'monitor-item';
const title = document.createElement('div');
title.className = 'monitor-title';
title.textContent = `${name} (${ip})`;
const frame = document.createElement('img');
frame.className = 'monitor-frame';
frame.src = `http://${ip}:81/stream?t=${Date.now()}`;
frame.alt = name;
// 连接失败占位图
frame.onerror = function () {
this.src = 'data:image/svg+xml;charset=UTF-8,%3Csvg xmlns="http://www.w3.org/2000/svg" width="100" height="100" viewBox="0 0 100 100"%3E%3Crect fill="%23222" width="100" height="100"/%3E%3Ctext fill="%23fff" font-family="Arial" font-size="12" x="50%" y="50%" text-anchor="middle" dominant-baseline="middle"%3E连接失败%3C/text%3E%3C/svg%3E';
};
monitorItem.appendChild(title);
monitorItem.appendChild(frame);
monitorGrid.appendChild(monitorItem);
});
modal.style.display = 'flex';
document.body.style.overflow = 'hidden';
} else {
alert('摄像头列表为空或接口异常');
}
} catch (err) {
console.error('摄像头接口请求失败:', err);
alert('摄像头接口请求失败');
}
});
// 关闭监控室模态框
document.getElementById('closeMonitorModal').addEventListener('click', function () {
document.getElementById('monitorRoomModal').style.display = 'none';
document.body.style.overflow = 'auto';
});
// 按钮控制逻辑,包含API请求
document.querySelectorAll('.control-btn').forEach(button => {
button.addEventListener('click', async function () {
const isActive = this.classList.contains('active');
const statusElement = this.querySelector('.status');
const deviceType = this.dataset.device; // pump/oxygen/insect
const machineNum = this.dataset.machine; // 机器编号
// 确定引脚映射
const pinMap = {
oxygen: { '1': 'V3', '2': 'V4' },
insect: { '1': 'V5', '2': 'V6' },
pump: { '1': 'V7', '2': 'V8' }
};
const pin = pinMap[deviceType]?.[machineNum];
if (!pin) {
alert('设备配置错误');
return;
}
try {
// 调用后端API
const response = await fetch(`${baseURL}/api/execute?pin=${pin}&state=${isActive ? '0' : '1'}`);
const result = await response.json();
if (result.code === 200) {
// 切换按钮状态
this.classList.toggle('active');
statusElement.textContent = isActive ? '关闭' : '开启';
} else {
alert(`控制失败: ${result.message}`);
}
} catch (error) {
console.error('请求出错:', error);
alert('网络请求失败,请检查连接');
}
});
});
/*
// 模拟实时数据更新
function updateParameterValues() {
document.querySelectorAll('.parameter-card').forEach(card => {
const valueElement = card.querySelector('.parameter-value');
const currentValue = parseFloat(valueElement.textContent.replace(/[^\d.-]/g, ''));
const unit = valueElement.textContent.replace(/[\d.-]/g, '').trim();
// 生成一个小的随机波动
const fluctuation = (Math.random() - 0.5) * 2;
const newValue = Math.max(0, currentValue + fluctuation).toFixed(2);
// 只更新数值部分,保留单位
valueElement.textContent = unit.includes('%') ?
`${parseFloat(newValue).toFixed(0)}%` :
unit.includes('Lux') ?
`${Math.round(parseFloat(newValue) * 1000).toLocaleString()} Lux` :
`${newValue}${unit}`;
});
// 更新时间戳
const now = new Date();
document.querySelector('.timestamp').textContent = now.toISOString().replace('T', ' ').substring(0, 19);
}
// 每3秒更新一次数据
setInterval(updateParameterValues, 3000);
// 初始更新
updateParameterValues(); */
</script>
3、CSS | style.css
* {
margin: 0;
padding: 0;
box-sizing: border-box;
font-family: 'Segoe UI', 'Microsoft YaHei', sans-serif;
-webkit-tap-highlight-color: transparent;
}
body {
background: linear-gradient(135deg, #1a2a3a, #0d1b2a);
color: #e0f7fa;
min-height: 100vh;
overflow-x: hidden;
padding: 10px;
}
.container {
max-width: 100%;
margin: 0 auto;
padding: 5px;
}
header {
text-align: center;
margin-bottom: 15px;
padding: 10px;
border-bottom: 2px solid rgba(0, 200, 255, 0.3);
}
header h1 {
font-size: 1.5rem;
margin-bottom: 5px;
background: linear-gradient(90deg, #00b4db, #00ff95);
-webkit-background-clip: text;
-webkit-text-fill-color: transparent;
text-shadow: 0 2px 10px rgba(0, 180, 219, 0.3);
}
.subtitle {
color: #80deea;
font-size: 0.9rem;
max-width: 100%;
margin: 0 auto;
line-height: 1.4;
}
.dashboard {
display: flex;
flex-direction: column;
gap: 15px;
}
.parameters-panel {
background: rgba(13, 27, 42, 0.8);
border-radius: 12px;
padding: 12px;
font-size: 0.85rem;
box-shadow: 0 5px 15px rgba(0, 0, 0, 0.4);
border: 1px solid rgba(64, 224, 208, 0.2);
max-height: 50vh;
overflow-y: auto;
}
.control-panel {
background: rgba(13, 27, 42, 0.8);
border-radius: 12px;
padding: 15px;
font-size: 0.9rem;
box-shadow: 0 5px 15px rgba(0, 0, 0, 0.4);
border: 1px solid rgba(64, 224, 208, 0.2);
}
.panel-title {
font-size: 1.2rem;
margin-bottom: 15px;
padding-bottom: 10px;
border-bottom: 2px solid rgba(0, 200, 255, 0.3);
color: #4fc3f7;
display: flex;
align-items: center;
gap: 8px;
}
.panel-title i {
font-size: 1.2rem;
}
.section {
margin-bottom: 20px;
}
.section-title {
font-size: 1.1rem;
color: #81d4fa;
margin-bottom: 12px;
display: flex;
align-items: center;
gap: 8px;
}
.parameters-grid {
display: grid;
grid-template-columns: repeat(auto-fill, minmax(160px, 1fr));
gap: 12px;
}
.parameter-card {
background: rgba(25, 55, 80, 0.6);
border-radius: 8px;
padding: 10px;
border: 1px solid rgba(64, 224, 208, 0.2);
transition: all 0.3s ease;
box-shadow: 0 3px 8px rgba(0, 0, 0, 0.15);
}
.parameter-card:hover {
transform: translateY(-3px);
box-shadow: 0 5px 15px rgba(0, 200, 255, 0.3);
border-color: rgba(0, 200, 255, 0.5);
}
.parameter-header {
display: flex;
justify-content: space-between;
align-items: center;
margin-bottom: 10px;
}
.parameter-name {
font-size: 0.95rem;
font-weight: 600;
color: #b3e5fc;
}
.parameter-icon {
font-size: 1.4rem;
color: #4fc3f7;
width: 40px;
height: 40px;
background: rgba(0, 150, 200, 0.2);
border-radius: 8px;
display: flex;
align-items: center;
justify-content: center;
}
.parameter-value {
font-size: 1.2rem;
font-weight: 600;
text-align: center;
margin: 5px 0;
font-family: 'Courier New', monospace;
color: #e1f5fe;
text-shadow: 0 0 5px rgba(100, 255, 255, 0.5);
}
.parameter-status {
text-align: center;
font-size: 0.8rem;
color: #b2ebf2;
font-style: italic;
}
.controls-grid {
display: grid;
grid-template-columns: 1fr;
gap: 15px;
margin-bottom: 15px;
}
.control-group {
background: rgba(25, 55, 80, 0.6);
border-radius: 12px;
padding: 15px;
border: 1px solid rgba(64, 224, 208, 0.2);
box-shadow: 0 5px 15px rgba(0, 0, 0, 0.2);
}
.control-title {
font-size: 1.1rem;
color: #81d4fa;
margin-bottom: 12px;
text-align: center;
}
.control-buttons {
display: flex;
justify-content: space-around;
gap: 10px;
}
.control-btn {
flex: 1;
padding: 12px 5px;
border: none;
border-radius: 10px;
font-size: 0.95rem;
font-weight: 600;
cursor: pointer;
transition: all 0.3s ease;
display: flex;
flex-direction: column;
align-items: center;
gap: 6px;
box-shadow: 0 5px 15px rgba(0, 0, 0, 0.3);
min-height: 90px;
}
.control-btn i {
font-size: 1.6rem;
}
.pump-btn {
background: linear-gradient(to bottom, #29b6f6, #0288d1);
color: #e1f5fe;
}
.pump-btn.active {
background: linear-gradient(to bottom, #00e676, #00c853);
box-shadow: 0 0 15px rgba(0, 230, 118, 0.5);
}
.oxygen-btn {
background: linear-gradient(to bottom, #26c6da, #0097a7);
color: #e1f5fe;
}
.oxygen-btn.active {
background: linear-gradient(to bottom, #00e676, #00c853);
box-shadow: 0 0 15px rgba(0, 230, 118, 0.5);
}
.insect-btn {
background: linear-gradient(to bottom, #7e57c2, #512da8);
color: #e1f5fe;
}
.insect-btn.active {
background: linear-gradient(to bottom, #00e676, #00c853);
box-shadow: 0 0 15px rgba(0, 230, 118, 0.5);
}
.camera-container {
background: rgba(0, 0, 0, 0.4);
border-radius: 12px;
overflow: hidden;
display: flex;
flex-direction: column;
border: 1px solid rgba(64, 224, 208, 0.2);
min-height: 240px;
}
.camera-header {
padding: 10px;
background: rgba(25, 55, 80, 0.8);
display: flex;
justify-content: space-between;
align-items: center;
}
.camera-title {
font-size: 1.1rem;
color: #81d4fa;
}
.camera-actions {
display: flex;
gap: 10px;
}
.camera-btn {
padding: 6px 12px;
background: rgba(0, 150, 200, 0.3);
border: 1px solid rgba(64, 224, 208, 0.3);
border-radius: 6px;
color: #b3e5fc;
cursor: pointer;
transition: all 0.3s ease;
font-size: 0.85rem;
}
.camera-btn:hover {
background: rgba(0, 200, 255, 0.5);
}
.camera-feed {
flex: 1;
background: linear-gradient(45deg, #0a1929, #0d2b45);
display: flex;
align-items: center;
justify-content: center;
position: relative;
}
.camera-placeholder {
display: flex;
flex-direction: column;
align-items: center;
justify-content: center;
text-align: center;
padding: 15px;
color: #81d4fa;
}
.camera-placeholder i {
font-size: 2.5rem;
margin-bottom: 10px;
color: rgba(100, 255, 255, 0.2);
}
.timestamp {
position: absolute;
bottom: 10px;
right: 10px;
background: rgba(0, 0, 0, 0.6);
padding: 4px 10px;
border-radius: 15px;
font-size: 0.75rem;
color: #b2ebf2;
}
.status-bar {
display: flex;
flex-wrap: wrap;
justify-content: space-between;
margin-top: 15px;
padding: 10px;
background: rgba(13, 27, 42, 0.8);
border-radius: 12px;
border: 1px solid rgba(64, 224, 208, 0.2);
gap: 8px;
}
.status-item {
display: flex;
align-items: center;
gap: 6px;
min-width: 48%;
padding: 3px;
}
.status-indicator {
width: 12px;
height: 12px;
border-radius: 50%;
background: #00e676;
box-shadow: 0 0 8px #00e676;
}
.status-indicator.offline {
background: #ff5252;
box-shadow: 0 0 8px #ff5252;
}
/* 横屏优化 */
@media (orientation: landscape) {
.dashboard {
flex-direction: row;
}
.parameters-panel {
max-height: 75vh;
/*中间左高度*/
flex: 3;
}
.control-panel {
flex: 2;
max-height: 75vh;
/*中间右高度*/
display: flex;
flex-direction: column;
}
.controls-grid {
grid-template-columns: repeat(3, 1fr);
}
.control-group {
padding: 12px;
}
.control-btn {
min-height: auto;
padding: 10px 5px;
}
.status-bar {
flex-wrap: nowrap;
}
.status-item {
min-width: auto;
}
}
/* 大屏幕优化 */
@media (min-width: 1200px) {
.container {
max-width: 1200px;
}
.dashboard {
flex-direction: row;
}
.parameters-panel {
max-height: 75vh;
flex: 3;
}
.control-panel {
flex: 2;
max-height: 75vh;
}
.controls-grid {
grid-template-columns: repeat(3, 1fr);
}
.control-group {
padding: 15px;
}
.control-btn {
padding: 15px 5px;
}
}
/* 动画效果 */
@keyframes pulse {
0% {
box-shadow: 0 0 0 0 rgba(0, 230, 118, 0.4);
}
70% {
box-shadow: 0 0 0 8px rgba(0, 230, 118, 0);
}
100% {
box-shadow: 0 0 0 0 rgba(0, 230, 118, 0);
}
}
.active {
animation: pulse 2s infinite;
}
/* 滚动条优化 */
::-webkit-scrollbar {
width: 6px;
height: 6px;
}
::-webkit-scrollbar-track {
background: rgba(13, 27, 42, 0.5);
border-radius: 6px;
}
::-webkit-scrollbar-thumb {
background: rgba(64, 224, 208, 0.5);
border-radius: 6px;
}
::-webkit-scrollbar-thumb:hover {
background: rgba(64, 224, 208, 0.8);
}
#camera-video {
width: 100%;
height: 100%;
object-fit: cover;
display: none;
}
/* 添加模态框样式 */
.modal-overlay {
display: none;
position: fixed;
top: 0;
left: 0;
right: 0;
bottom: 0;
background-color: rgba(0, 0, 0, 0.7);
z-index: 100;
justify-content: center;
align-items: center;
}
.modal-container {
width: 80vw;
height: 80vh;
background-color: #fff;
border-radius: 8px;
overflow: hidden;
box-shadow: 0 0 20px rgba(0, 0, 0, 0.3);
display: flex;
flex-direction: column;
}
.modal-header {
padding: 10px 15px;
background-color: #2c3e50;
color: white;
display: flex;
justify-content: space-between;
align-items: center;
}
.modal-content {
flex: 1;
background-color: black;
position: relative;
}
#modal-video {
width: 100%;
height: 100%;
object-fit: contain;
}
.close-modal {
background: none;
border: none;
color: white;
font-size: 20px;
cursor: pointer;
}
.select-wrapper {
position: relative;
display: inline-block;
vertical-align: middle;
/* 让包裹层高度和按钮一致 */
height: 36px;
max-width: 98px;
/* 你需要的宽度 */
user-select: none;
}
/* 左侧图标 */
.select-wrapper::before {
content: "\f2f1";
/* fa-sync-alt */
font-family: "Font Awesome 6 Free";
font-weight: 900;
position: absolute;
left: 12px;
top: 50%;
transform: translateY(-50%);
color: #b3e5fc;
pointer-events: none;
}
/* 下拉框本体 */
.camera-select {
-webkit-appearance: none;
-moz-appearance: none;
appearance: none;
background: rgba(0, 150, 200, 0.3);
border: 1px solid rgba(64, 224, 208, 0.3);
border-radius: 6px;
color: #b3e5fc;
padding: 6px 12px 6px 30px;
/* 左侧图标位置预留 */
font-size: 0.85rem;
height: 36px;
cursor: pointer;
box-shadow: 0 0 6px rgba(64, 224, 208, 0.4);
transition: background 0.3s ease, box-shadow 0.3s ease;
outline: none;
width: 100%;
}
/* hover和focus效果 */
.camera-select:hover,
.camera-select:focus {
background: rgba(0, 200, 255, 0.5);
box-shadow: 0 0 15px rgba(0, 200, 255, 0.7);
color: #e0f7fa;
}
/* 彻底隐藏默认箭头 */
.camera-select::-ms-expand {
display: none;
}
/* 兼容Safari和Chrome隐藏箭头 */
.camera-select::-webkit-inner-spin-button,
.camera-select::-webkit-calendar-picker-indicator {
display: none;
}
.camera-select::-webkit-dropdown-arrow {
display: none;
}
/* 监控室模态框样式 */
.monitor-room {
width: 90vw;
height: 90vh;
max-width: 1400px;
display: flex;
/* 新增 */
flex-direction: column;
/* 新增 */
}
.modal-header {
flex-shrink: 0;
/* 新增 - 防止标题栏被压缩 */
}
.modal-content {
flex: 1;
/* 新增 - 填充剩余空间 */
overflow-y: auto;
/* 新增 - 垂直滚动 */
padding: 10px;
background: #111;
}
.monitor-grid {
display: grid;
grid-template-columns: repeat(2, 1fr);
grid-template-rows: repeat(2, 1fr);
gap: 10px;
width: 100%;
min-height: min-content;
/* 新增 - 确保网格有足够高度 */
/* 移除 height: 100% - 让内容决定高度 */
}
.monitor-title {
position: absolute;
top: 0;
left: 0;
right: 0;
background: rgba(0, 0, 0, 0.7);
color: white;
padding: 5px 10px;
font-size: 14px;
z-index: 2;
}
.monitor-frame {
width: 100%;
height: 100%;
object-fit: cover;
}
.monitor-item {
background: #222;
border-radius: 5px;
overflow: hidden;
position: relative;
box-shadow: 0 0 10px rgba(0, 0, 0, 0.5);
aspect-ratio: 16/9;
/* 新增 - 保持视频比例 */
min-height: 200px;
/* 新增 - 最小高度 */
}
/* 自定义滚动条样式 */
.modal-content::-webkit-scrollbar {
width: 8px;
}
.modal-content::-webkit-scrollbar-track {
background: rgba(13, 27, 42, 0.5);
border-radius: 4px;
}
.modal-content::-webkit-scrollbar-thumb {
background: rgba(64, 224, 208, 0.5);
border-radius: 4px;
}
.modal-content::-webkit-scrollbar-thumb:hover {
background: rgba(64, 224, 208, 0.8);
}
/* 响应式调整 */
@media (max-width: 768px) {
.monitor-grid {
grid-template-columns: 1fr;
grid-template-rows: unset;
/* 改为自动高度 */
}
.monitor-item {
min-height: 180px;
/* 调整移动端最小高度 */
}
}
4、配置文件 | config.js
// config.js
const AppConfig = {
// API_BASE_URL: "http://10.51.251.202:5000"
API_BASE_URL: "http://192.168.43.146:5000"
// API_BASE_URL: "http://127.0.0.1:5000"
// API_BASE_URL: "http://192.168.1.21:5000"
};
运行页面
右键index.html,点击Open with Live Server

访问http://127.0.0.1:5500/index.html

六、AI小农开发
配置AI小农
1、首次配网
请提供稳定2.4G的wifi网络
系统通电
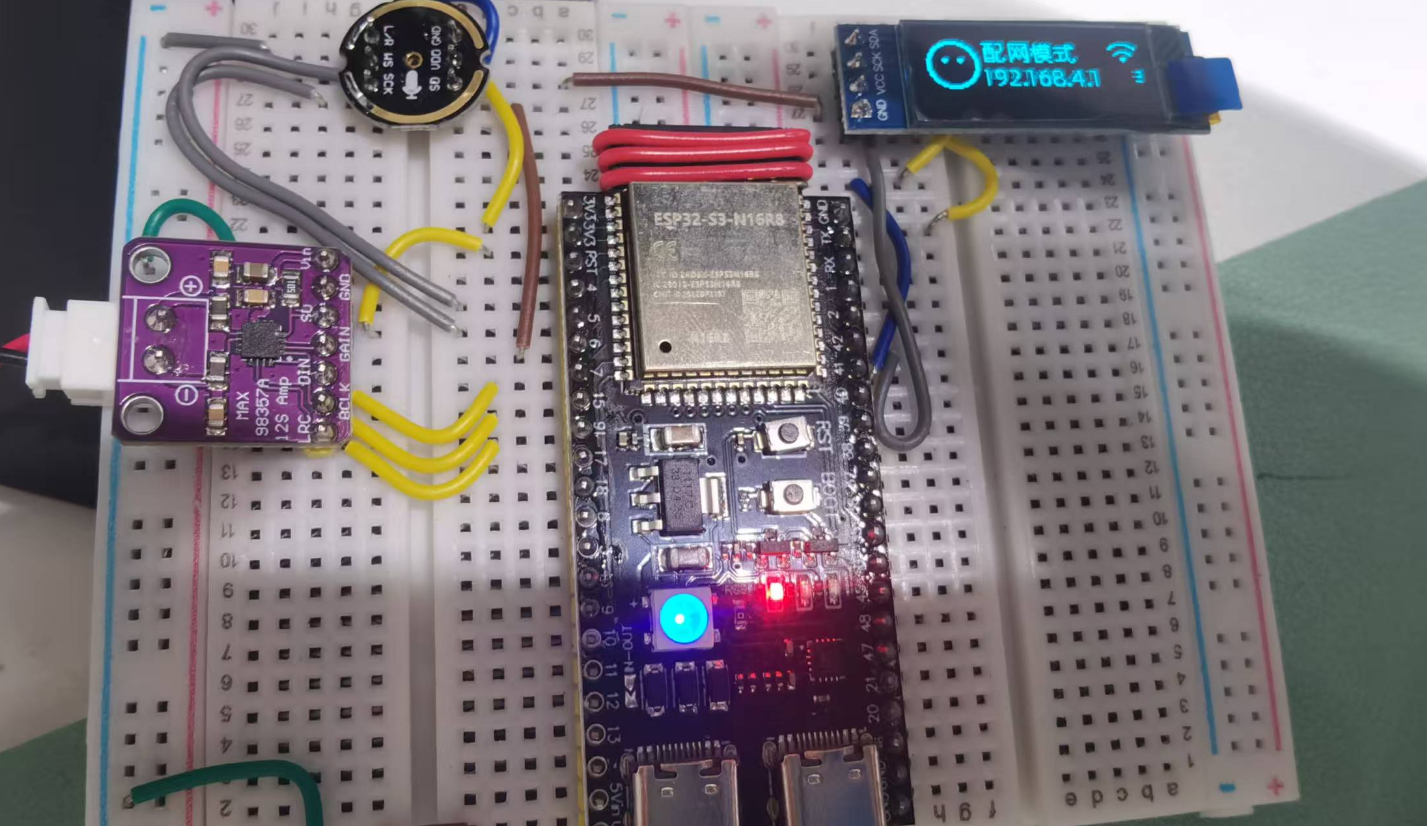
连接设备发出的WIFI信号

自动跳转到192.168.4.1地址,输入需要链接的wifi信息,连接

等待设备重启

设备显示 服务地址 及 验证码
2、添加设备
登录到小智后台:https://xiaozhi.me ,点控制台
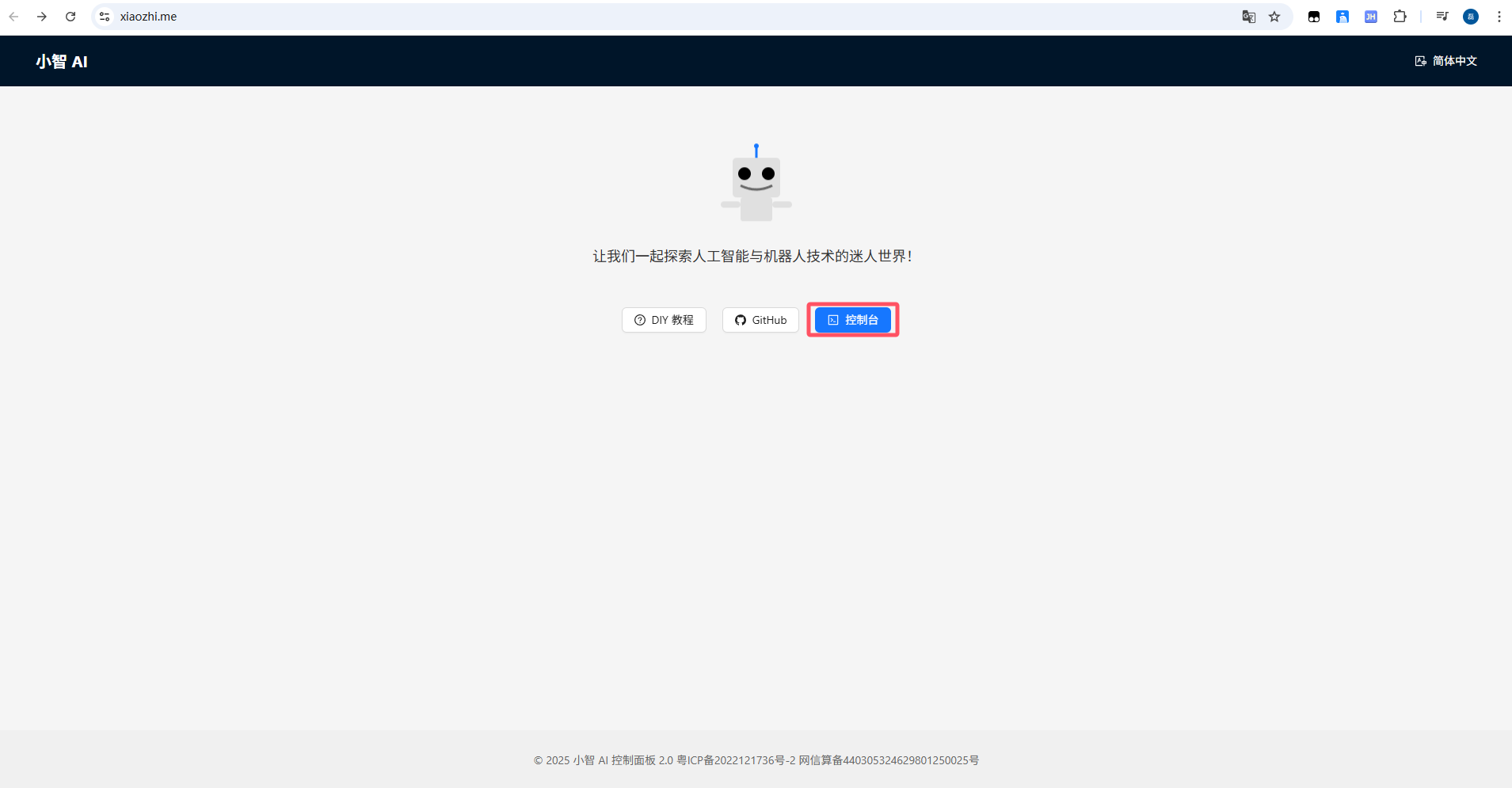
选择新建智能体-->小农

选择添加设备-->填入验证码

设备添加成功

3、配置角色
选择配置角色

填写角色信息

保存和获取MCP接入点

环境搭建
1、开发工具
- Python 3.12
- PyCharm 2021.3.1
2、项目结构
接口开发
1、项目依赖 | requirements.txt
python-dotenv>=1.0.0
websockets>=11.0.3
mcp>=1.8.1
pydantic>=2.11.4
PyYAML~=6.0.2
requests~=2.31.0
2、配置文件 | config.yaml
device_url: "http://127.0.0.1:5000"
# 小智后台MCP地址
xiaozhi_mcp: "wss://api.xiaozhi.me/mcp/?token=eyJh********2g"
3、主程序 | main.py
# server.py
from mcp.server.fastmcp import FastMCP
import sys
import logging
import requests
from utils.configUtils import BASE_URL
logger = logging.getLogger('WaterOxygenService')
# Fix UTF-8 encoding for Windows console
if sys.platform == 'win32':
sys.stderr.reconfigure(encoding='utf-8')
sys.stdout.reconfigure(encoding='utf-8')
# Create MCP server
mcp = FastMCP("WaterOxygenService")
# 工具:数学计算(保留原功能)
@mcp.tool()
def calculator(python_expression: str) -> dict:
"""用于数学表达式计算,可使用 math 和 random 模块"""
import math, random
result = eval(python_expression)
logger.info(f"Calculating: {python_expression} = {result}")
return {"success": True, "result": result}
# 工具:获取水质溶解氧浓度
@mcp.tool()
def get_water_oxygen() -> dict:
"""查询当前水体溶解氧浓度"""
try:
response = requests.get(f"{BASE_URL}/api/waterOxyNow", timeout=5)
if response.status_code == 200:
json_data = response.json()
value = json_data.get("data", {}).get("data", [])[0].get("value")
return {
"success": True,
"value": value,
"unit": "mg/L",
"timestamp": json_data.get("data", {}).get("createTime")
}
else:
return {"success": False, "error": f"HTTP {response.status_code}"}
except Exception as e:
return {"success": False, "error": str(e)}
@mcp.tool()
def control_device(area: str, action: str) -> dict:
"""
控制农田设备的开关操作,如增氧、除虫、抽水等。
参数:
- area: 地区,如 "东区增氧", "西区抽水"
- action: 动作,"打开" 或 "关闭"
"""
# 区域+设备到 pin 的映射
pin_map = {
"东区增氧": "V3",
"西区增氧": "V4",
"东区除虫": "V5",
"西区除虫": "V6",
"东区抽水": "V7",
"西区抽水": "V8"
}
# 动作到状态的映射
state_map = {
"打开": 1,
"开启": 1,
"开": 1,
"关闭": 0,
"关": 0
}
# 匹配指令
pin = pin_map.get(area)
state = state_map.get(action)
if pin is None or state is None:
return {"success": False, "error": "无效的区域或动作参数"}
url = f"{BASE_URL}/api/execute?pin={pin}&state={state}"
try:
response = requests.get(url, timeout=5)
if response.status_code == 200:
return {
"success": True,
"area": area,
"action": action,
"pin": pin,
"state": state,
"message": "执行成功"
}
else:
return {"success": False, "error": f"HTTP {response.status_code}"}
except Exception as e:
return {"success": False, "error": str(e)}
# 启动 MCP 服务(通过 stdio 与 mcp_pipe.py 通信)
if __name__ == "__main__":
mcp.run(transport="stdio")
4、全局配置获取 | configUtils.py
import yaml
import os
def load_base_url():
config_path = os.path.join(os.path.dirname(__file__), '../config.yaml')
with open(config_path, 'r', encoding='utf-8') as f:
return yaml.safe_load(f).get("device_url", "http://127.0.0.1:5000")
BASE_URL = load_base_url()
def load_mcp_endpoint():
config_path = os.path.join(os.path.dirname(__file__), '../config.yaml')
if os.path.exists(config_path):
with open(config_path, 'r', encoding='utf-8') as f:
return yaml.safe_load(f).get("xiaozhi_mcp")
MCP_URL = load_mcp_endpoint()
5、MCP服务桥接 | mcp_pipe.py
"""
This script is used to connect to the MCP server and pipe the input and output to the websocket endpoint.
Version: 0.1.0
Usage:
export MCP_ENDPOINT=<mcp_endpoint>
python mcp_pipe.py <mcp_script>
"""
import asyncio
import websockets
import subprocess
import logging
import os
import signal
import sys
import random
from dotenv import load_dotenv
# Load environment variables from .env file
from utils.configUtils import MCP_URL
load_dotenv()
# Configure logging
logging.basicConfig(
level=logging.INFO,
format='%(asctime)s - %(name)s - %(levelname)s - %(message)s'
)
logger = logging.getLogger('MCP_PIPE')
# Reconnection settings
INITIAL_BACKOFF = 1 # Initial wait time in seconds
MAX_BACKOFF = 600 # Maximum wait time in seconds
reconnect_attempt = 0
backoff = INITIAL_BACKOFF
async def connect_with_retry(uri):
"""Connect to WebSocket server with retry mechanism"""
global reconnect_attempt, backoff
while True: # Infinite reconnection
try:
if reconnect_attempt > 0:
wait_time = backoff * (1 + random.random() * 0.1) # Add some random jitter
logger.info(f"Waiting {wait_time:.2f} seconds before reconnection attempt {reconnect_attempt}...")
await asyncio.sleep(wait_time)
# Attempt to connect
await connect_to_server(uri)
except Exception as e:
reconnect_attempt += 1
logger.warning(f"Connection closed (attempt: {reconnect_attempt}): {e}")
# Calculate wait time for next reconnection (exponential backoff)
backoff = min(backoff * 2, MAX_BACKOFF)
async def connect_to_server(uri):
"""Connect to WebSocket server and establish bidirectional communication with `mcp_script`"""
global reconnect_attempt, backoff
try:
logger.info(f"Connecting to WebSocket server...")
async with websockets.connect(uri) as websocket:
logger.info(f"Successfully connected to WebSocket server")
# Reset reconnection counter if connection closes normally
reconnect_attempt = 0
backoff = INITIAL_BACKOFF
# Start mcp_script process
process = subprocess.Popen(
['python', mcp_script],
stdin=subprocess.PIPE,
stdout=subprocess.PIPE,
stderr=subprocess.PIPE,
encoding='utf-8',
text=True # Use text mode
)
logger.info(f"Started {mcp_script} process")
# Create two tasks: read from WebSocket and write to process, read from process and write to WebSocket
await asyncio.gather(
pipe_websocket_to_process(websocket, process),
pipe_process_to_websocket(process, websocket),
pipe_process_stderr_to_terminal(process)
)
except websockets.exceptions.ConnectionClosed as e:
logger.error(f"WebSocket connection closed: {e}")
raise # Re-throw exception to trigger reconnection
except Exception as e:
logger.error(f"Connection error: {e}")
raise # Re-throw exception
finally:
# Ensure the child process is properly terminated
if 'process' in locals():
logger.info(f"Terminating {mcp_script} process")
try:
process.terminate()
process.wait(timeout=5)
except subprocess.TimeoutExpired:
process.kill()
logger.info(f"{mcp_script} process terminated")
async def pipe_websocket_to_process(websocket, process):
"""Read data from WebSocket and write to process stdin"""
try:
while True:
# Read message from WebSocket
message = await websocket.recv()
logger.debug(f"<< {message[:120]}...")
# Write to process stdin (in text mode)
if isinstance(message, bytes):
message = message.decode('utf-8')
process.stdin.write(message + '\n')
process.stdin.flush()
except Exception as e:
logger.error(f"Error in WebSocket to process pipe: {e}")
raise # Re-throw exception to trigger reconnection
finally:
# Close process stdin
if not process.stdin.closed:
process.stdin.close()
async def pipe_process_to_websocket(process, websocket):
"""Read data from process stdout and send to WebSocket"""
try:
while True:
# Read data from process stdout
data = await asyncio.get_event_loop().run_in_executor(
None, process.stdout.readline
)
if not data: # If no data, the process may have ended
logger.info("Process has ended output")
break
# Send data to WebSocket
logger.debug(f">> {data[:120]}...")
# In text mode, data is already a string, no need to decode
await websocket.send(data)
except Exception as e:
logger.error(f"Error in process to WebSocket pipe: {e}")
raise # Re-throw exception to trigger reconnection
async def pipe_process_stderr_to_terminal(process):
"""Read data from process stderr and print to terminal"""
try:
while True:
# Read data from process stderr
data = await asyncio.get_event_loop().run_in_executor(
None, process.stderr.readline
)
if not data: # If no data, the process may have ended
logger.info("Process has ended stderr output")
break
# Print stderr data to terminal (in text mode, data is already a string)
sys.stderr.write(data)
sys.stderr.flush()
except Exception as e:
logger.error(f"Error in process stderr pipe: {e}")
raise # Re-throw exception to trigger reconnection
def signal_handler(sig, frame):
"""Handle interrupt signals"""
logger.info("Received interrupt signal, shutting down...")
sys.exit(0)
if __name__ == "__main__":
# Register signal handler
signal.signal(signal.SIGINT, signal_handler)
# mcp_script
if len(sys.argv) < 2:
logger.error("Usage: mcp_pipe.py <mcp_script>")
sys.exit(1)
mcp_script = sys.argv[1]
# Get token from environment variable or command line arguments
endpoint_url = os.environ.get('MCP_ENDPOINT') or MCP_URL
if not endpoint_url:
logger.error("MCP endpoint not found. Please set it in environment variable MCP_ENDPOINT or config.yaml.")
sys.exit(1)
# Start main loop
try:
asyncio.run(connect_with_retry(endpoint_url))
except KeyboardInterrupt:
logger.info("Program interrupted by user")
except Exception as e:
logger.error(f"Program execution error: {e}")
程序运行 | CMD运行
1、安装依赖:
pip install -r requirements.txt
2、运行
python mcp_pipe.py server.py
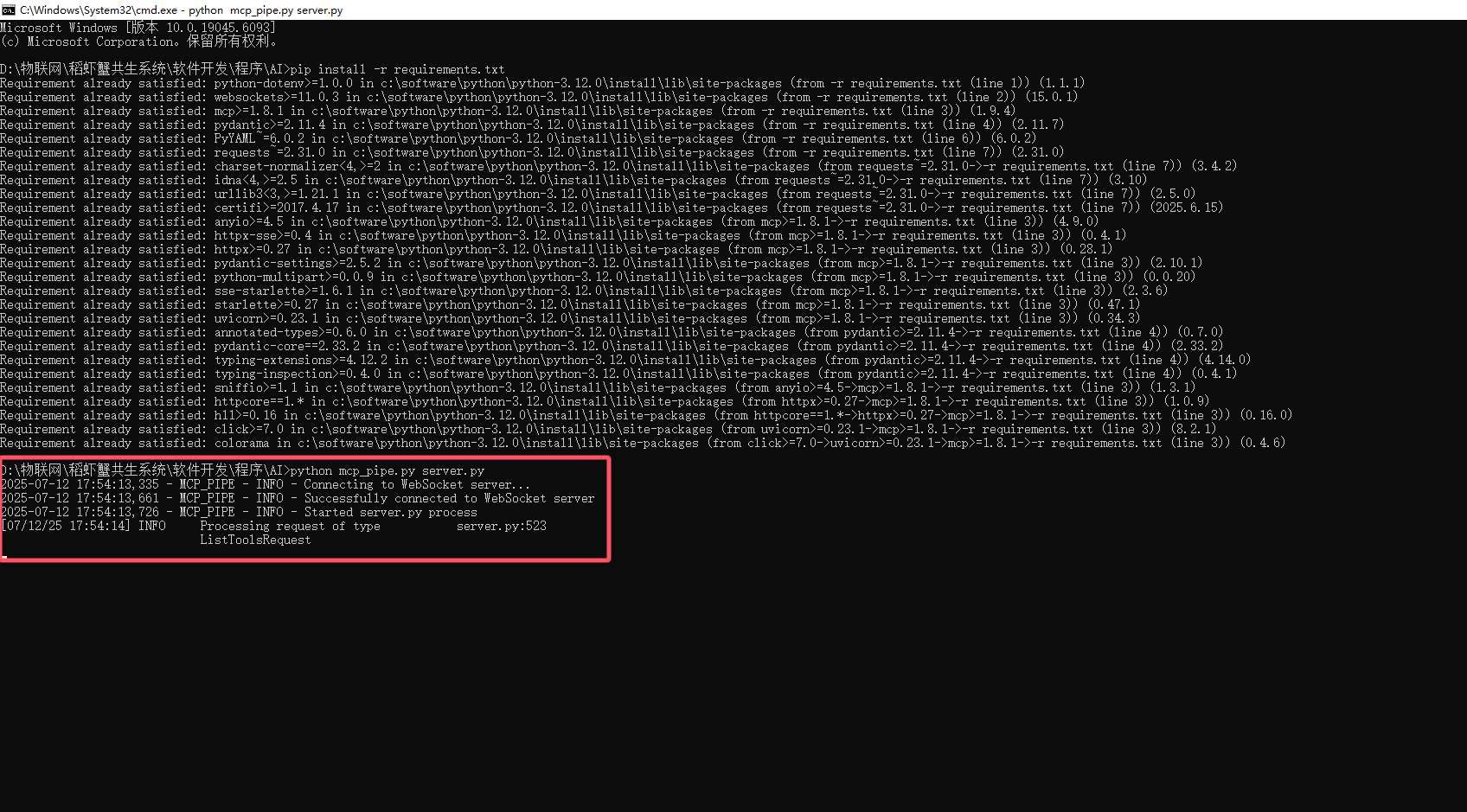
七、成果实景


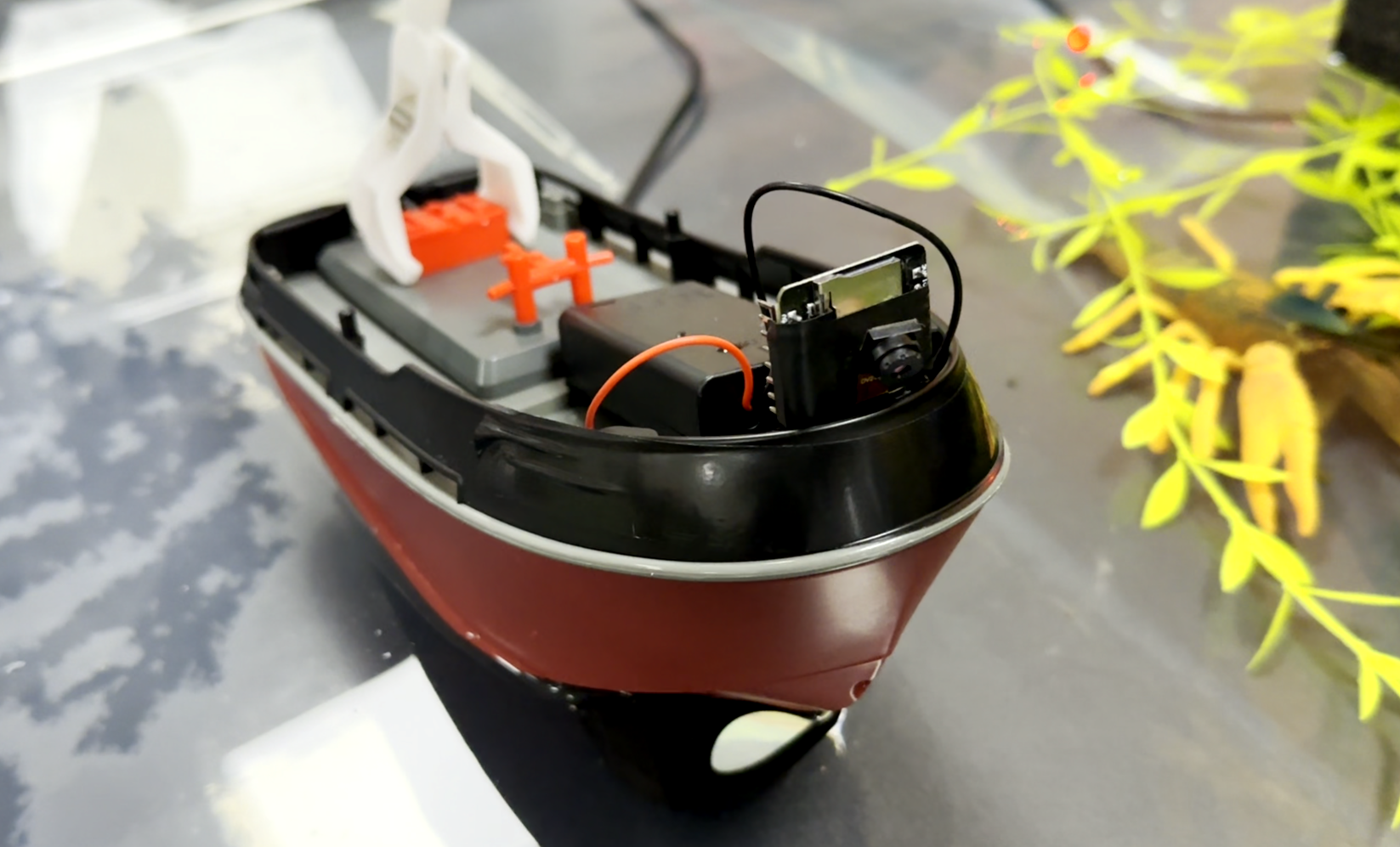
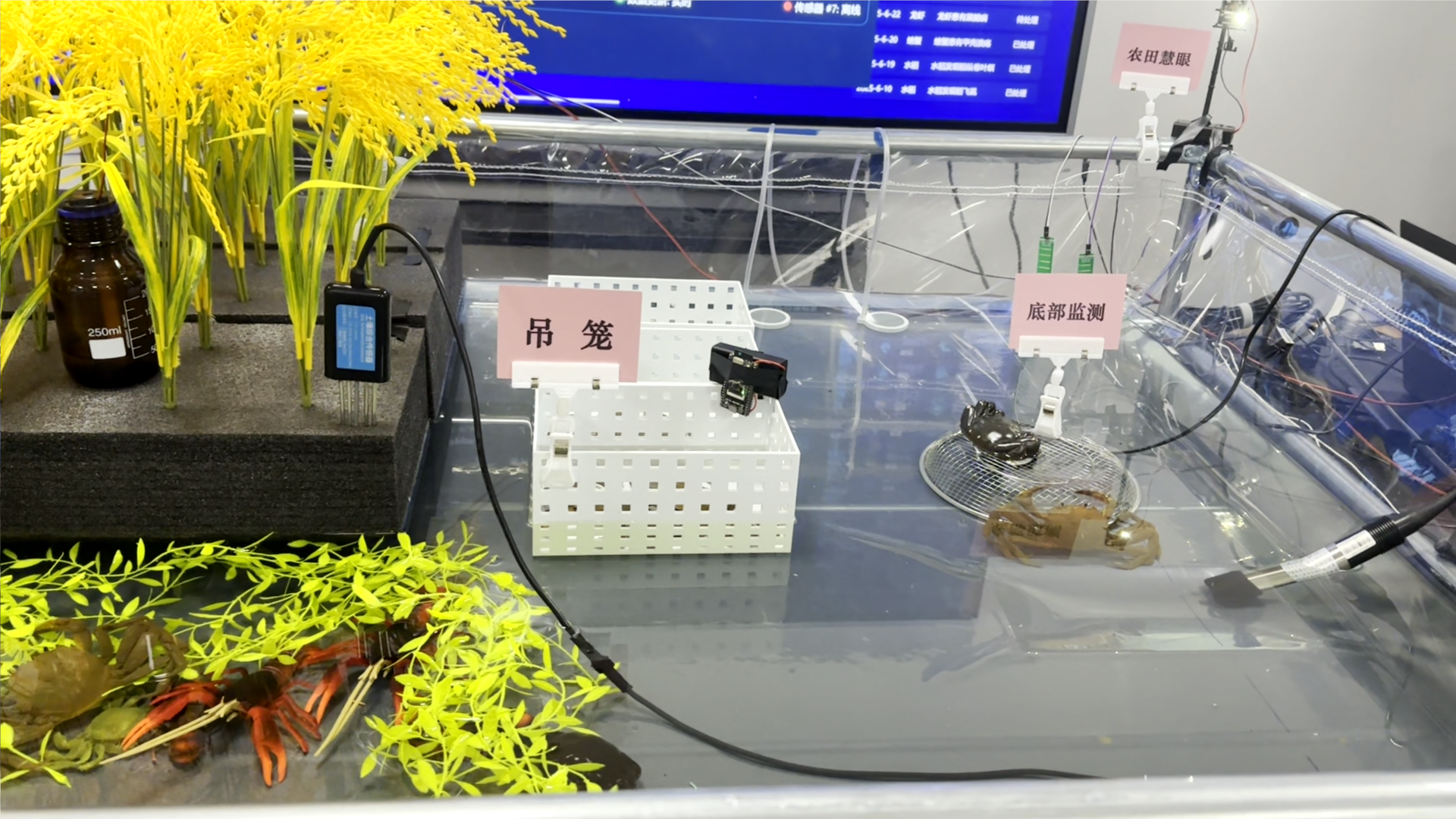
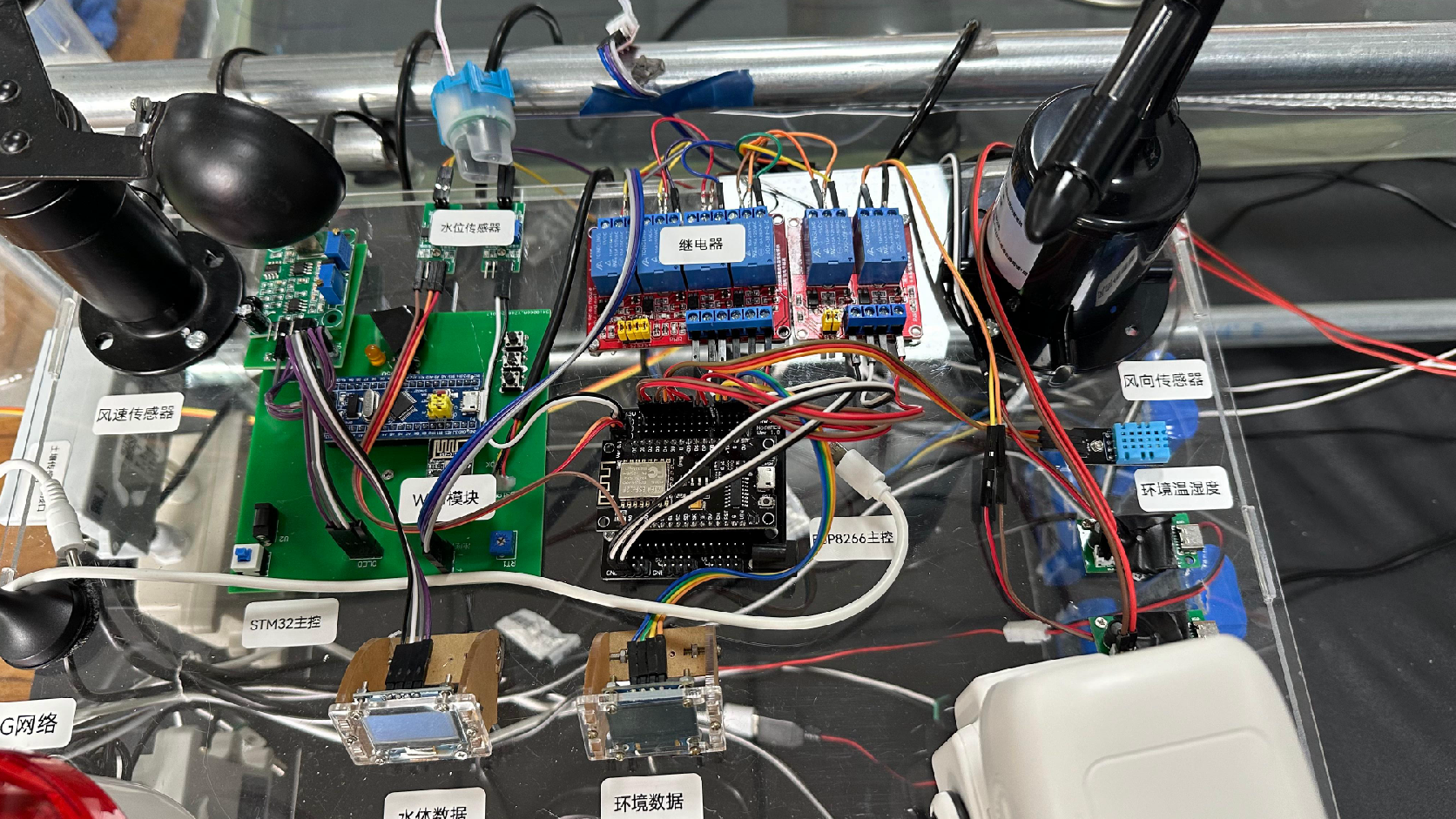

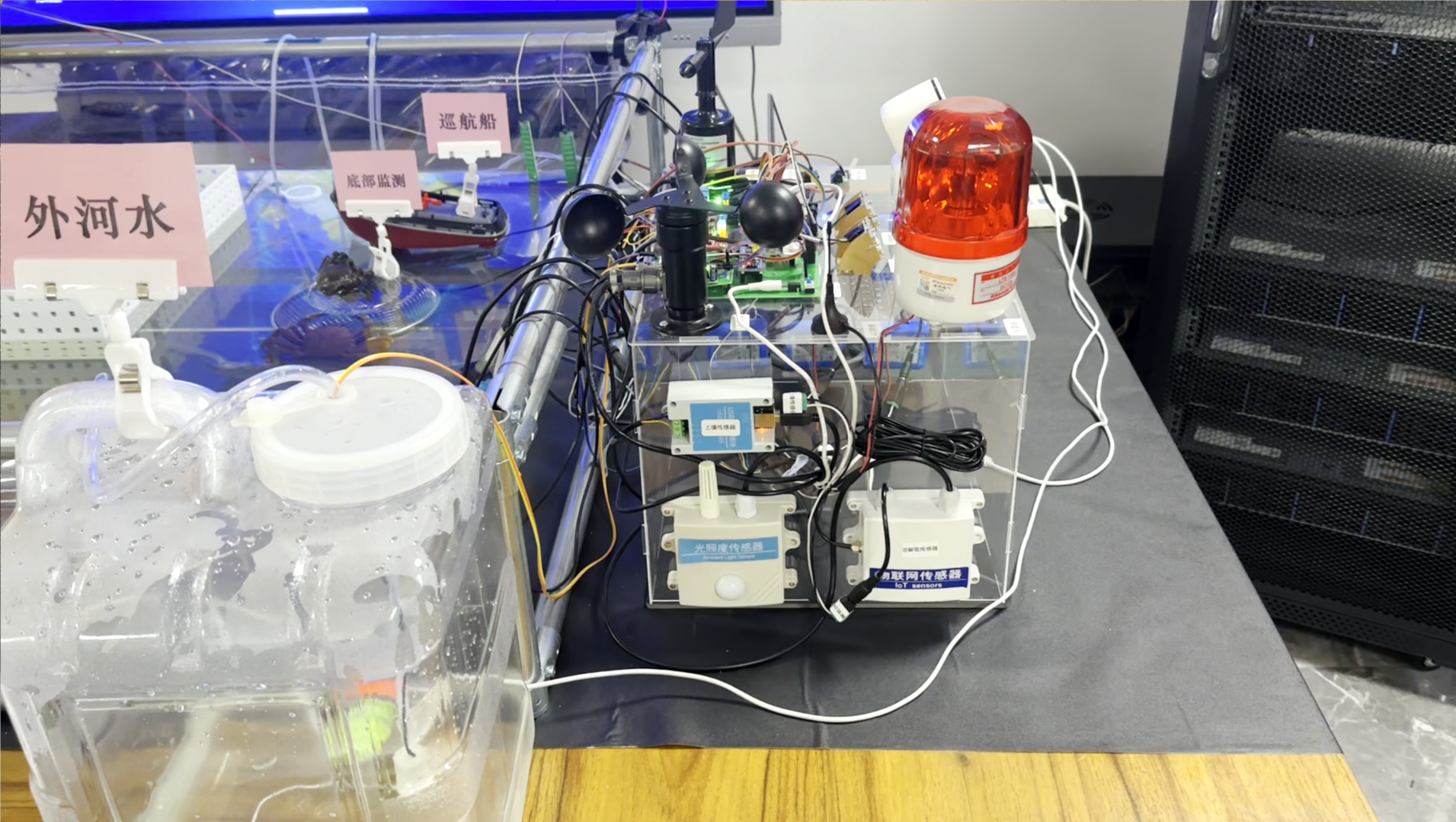





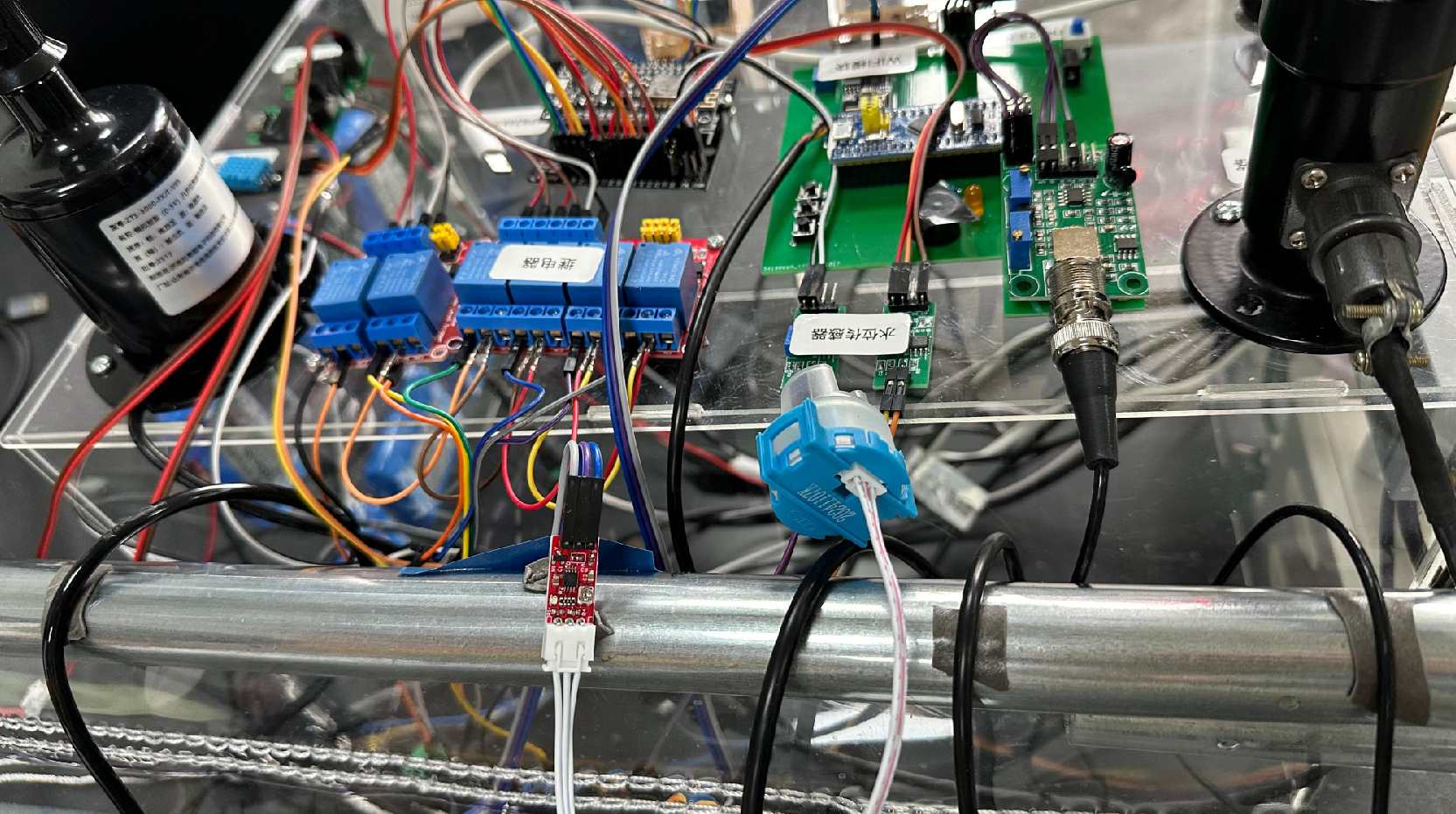
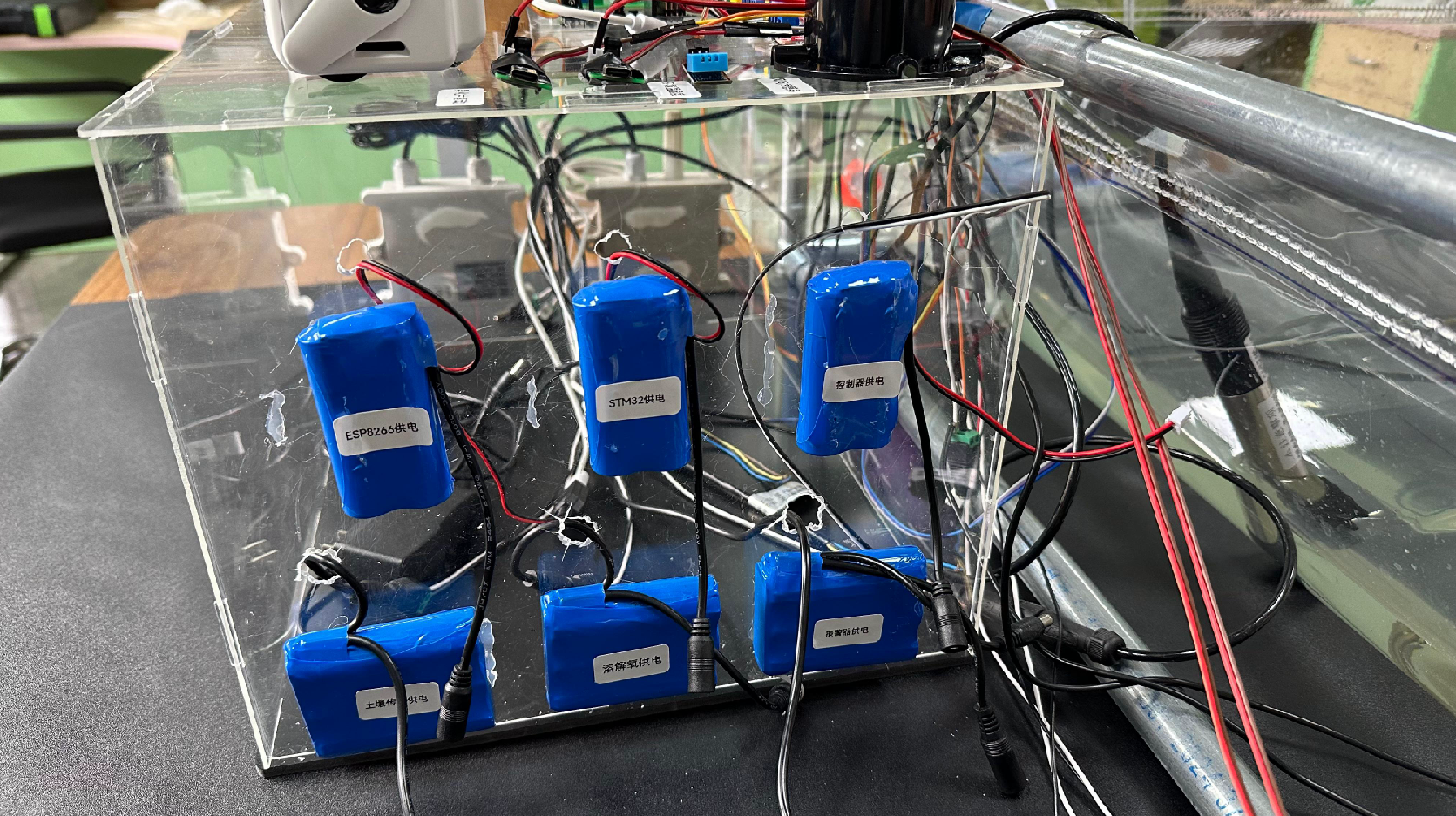
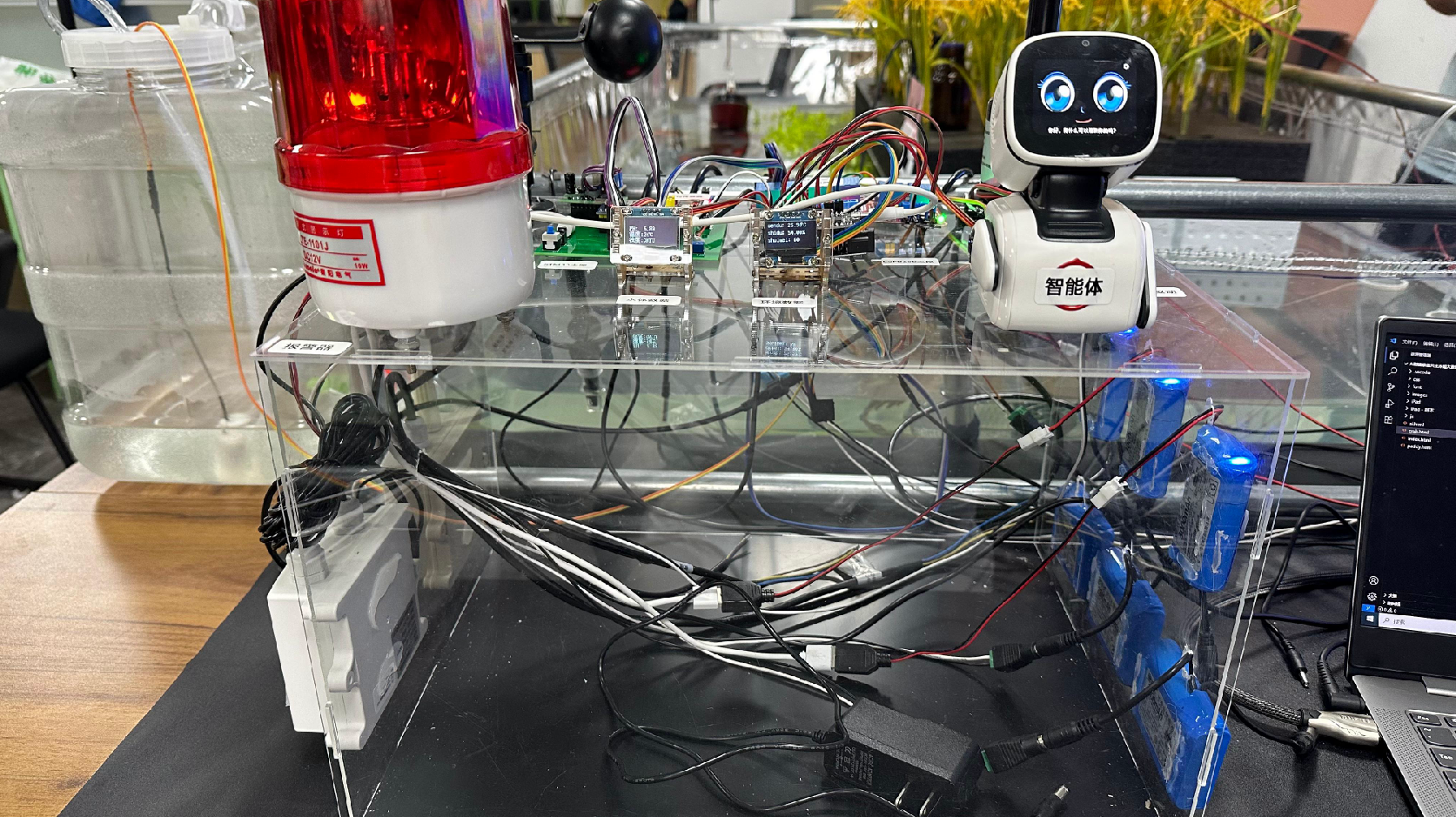
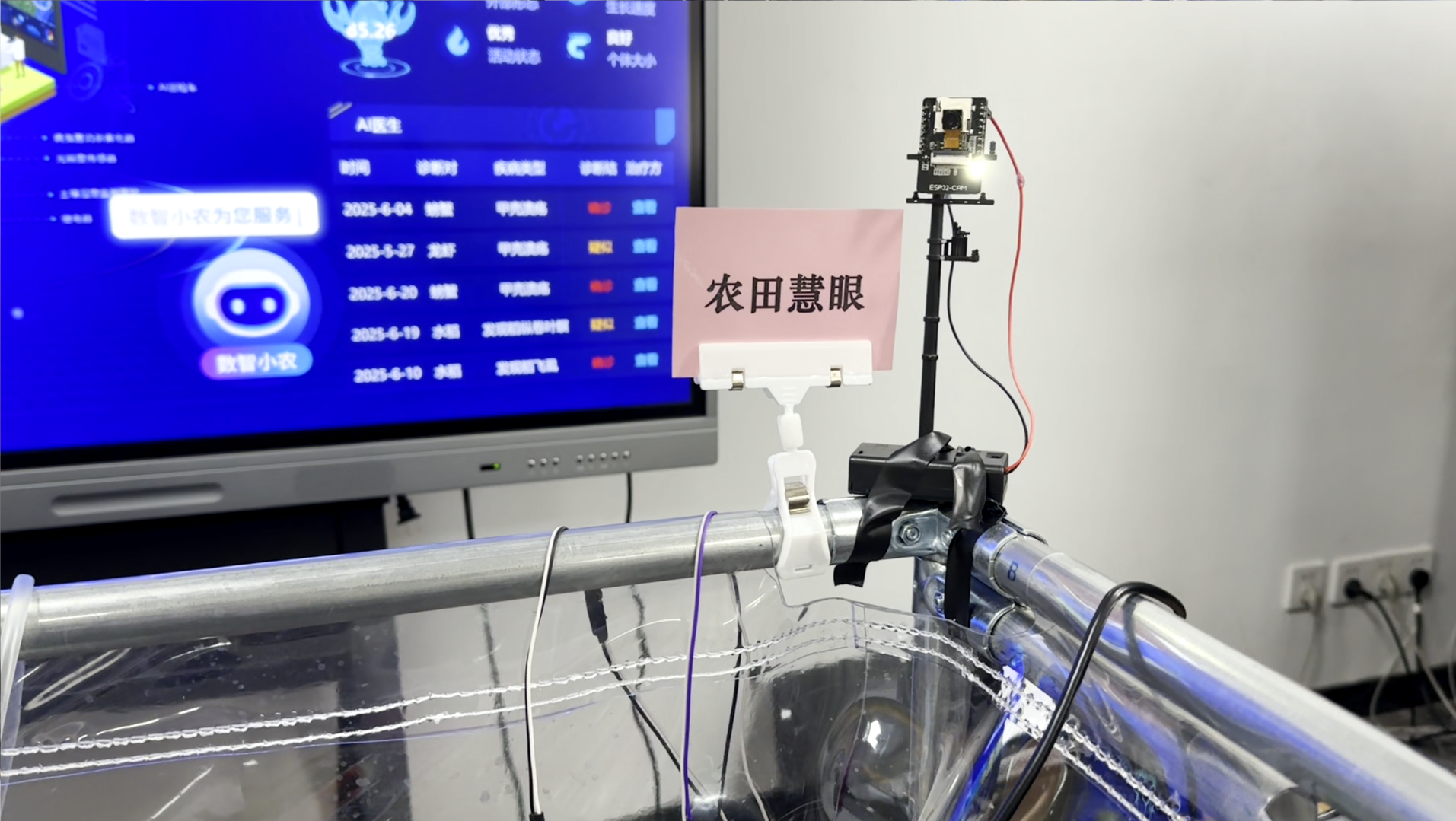

 0
0 0
0 0
0 0
0 0
0 0
0





